a - угол контакта, a = 300;
dз – диаметр отверстия под центра, dз = 130 мм = 0,13 м.
![]() кг < [Рдет] = 26 кг
кг < [Рдет] = 26 кг
Расчёт показал, что требуемое усилие закрепления незначительно применение гидро- или пневмопривода нецелесообразно.
В данном случае можно использовать винтовой механизм зажима в … задней бабки.
Погрешность закрепления (eз), вызываемая человеческим фактором, будет сказываться на линейных размерах. А так как мы измеряем 2 радиальных и 1 торцевое биение, то её можно принять eз » 0, потому что технологическая база (центровые отверстия) и продольная ось (диаметров втулки) контролируемых параметров совпадает.
19.2.8 Определение условий, в которых будет эксплуатироваться КИП.
Измерение контролируемых параметров будет производиться непосредственно на механическом участке (рабочем месте шлифовщика), расположенном рядом столе. Отсюда можно сделать вывод о не совсем благоприятных условиях эксплуатации КИП.
Во-первых, возможно попадание СОЖ, стружки, пыли.
Климат рабочей зоны:
Температура в рабочей зоне: t = 19-23 0С;
Относительная влажность воздуха: jн = 70 % (при 21 0С);
Скорость движения воздуха: Vв = 0,2-0,4 м/с;
Атмосферное давление: Рат = 101,3 КПа ± 5 КПа.
Допускаемые величины микроклимата в рабочей зоне приняты по ГОСТ 12.1.005-88 для категорий работ «средней тяжести».
Частота вибраций, вызываемая станком f = 20-30 Гц. При эксплуатации КИП возможны сотрясения и удары. Освещённость участка Ед = 100 люкс, что недостаточно. Поэтому на столе контроля предусматриваем местное освещение с Еф = 1000 люкс [9, с. 164, 165]. Температура детали после обработки должна быть в пределах 20±10 0С.
Перечисленные условия обязывают конструктора предусмотреть конструктивно-технологические мероприятия по защите КИП от влияния абразивов и коррозирующих веществ, мешающих нормальному функционированию приспособления.
19.2.9 Составление перечня частных функций, которые следует реализовать в КИП.
Составим набор функций, который необходимо осуществить, чтобы стала возможной операция контроля.
1 Установка (снятие)
2 Настройка
3 Объединение
4 Приём информации
5 Передача и преобразование информации
6 Выдача результатов измерения
7 Отвод и подвод средства измерения
Задаёмся продолжительностью реализации частных функций:
tф1 = 20 с; tф2 = 9 с; tф5 = 10 с; tф6 = 10 с; tф7 = 10 с; tф8 = 5 с.

! ! ! ! ! ! ! ! ! ! ! ! ! !
19.3 Выбор и обоснование метода измерения.
При выборе контактного или бесконтактного метода измерения отдаём предпочтение контактному. Это обусловлено тем, что прочностные характеристики материала (сталь 35 по ГОСТ 1050-74) достаточно высоки и поверхность на которой будет проводиться измерения воспримем измерительное усилие без деформации и сжатия.
Для обеспечения точного применим наконечник сферической формы с радиусом сферы В = 5 мм и L = 10 мм (пригодны для измерения по 1 и 2 классам точности). Наконечник НРС-5 класса 1 ГОСТ 11007-66 оснащен твёрдооплавной вставкой (тв. сплав по ГОСТ 3882-71).
Учитывая значительную твёрдость контролируемых поверхностей и допуск измеряемых биений Т = 20 мкм, ориентировочно назначаем измерительное усилие Рус = 500 с Н = 5 Н. Тогда ожидаемая погрешность от измерительного усилия по формуле Герца составит:
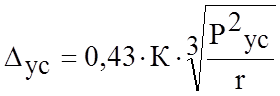 ,
,
где Dус – величина погрешности;
К – коэффициент, зависящий от материала наконечника, при твёрдом сплаве, К = 0,81;
Рус – измерительное усилие, Рус = 5 Н;
r – радиус сферы наконечника, r = 5 мм.
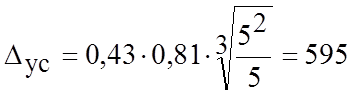 мкм.
мкм.
! ! ! ! ! ! ! ! ! ! ! ! ! !
Рисунок 19.8 – Наконечник измерительный (ГОСТ 11007-66).
Деталь может контролироваться в состоянии покоя (статический метод), либо перемещаться (вращаться). В нашем случае применим комбинированный метод: поворот – промер.
Из двух возможных методов абсолютного и относительного для измерения радиального и торцевого биения примем относительное, так как необходимо будет фиксировать min и max отклонения и находить разницу.
Т = Dmax – Dmin.
Данный метод представляет более широкие возможности для различных конструктивных решений, а также позволяет осуществить более точные измерения.
КИП должен иметь шкальные отсчётные устройства, которые обеспечивают достаточную точность отсчёта без чрезмерного напряжения зрения.
Принимаем механический принцип преобразования измерительной информации.
19.4 Выбор и обоснование средства измерения.
19.4.1 Выбор средства измерения.
Выбор средства измерения начнём с определения оптимальных, метрологических, эксплуатационных и надёжностных характеристик., которыми должно обладать СИ.
19.4.1.1 Допускаемая суммарная погрешность измерения КИП.
Находим как часть допуска размера контролируемого параметра (радиальное и торцевое биение):
![]() ,
,
где К – зависит от квалитета контролируемого размера (К для «5» степени точности радиального биения К = 0,35).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.