












Министерство образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЁТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ № 1
|
По дисциплине __________________________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
|
_____________________________________________________________________________
Автор: студент гр. ММ-00 ____________________ / /
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
Руководитель проекта ст.преп. ______________________ / /
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002
Содержание
Содержание. 2
Задание и исходные данные. 3
1. Основные кинематические характеристики механизма. 4
2. Структурный анализ механизма. 5
3. Построение плана положений механизма. 6
4. Построение плана скоростей механизма. 7
5. Построение плана ускорений механизма. 9
6. Построение кинематических диаграмм.. 13
Вывод. 14
Задание и исходные данные
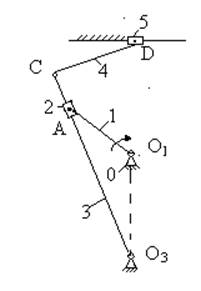
В данном расчетно-графическом задании проводится кинематическое исследование плоского рычажного механизма перемещения резца. Исследуемый механизм изображен на рис. 1. Исходные данные представлены в таблице 1.
|
![]()
Назначение данного механизма состоит в преобразовании вращательного движения кривошипа в возвратно-поступательное движение подачи резца.
|
|
|
|
|
|
|
|
|
0,16 |
0,68 |
0,24 |
0,37 |
0,28 |
12 |
1. Основные кинематические характеристики механизма
|
|
Звено |
1 |
2 |
3 |
4 |
5 |
|
Характер движения |
Вращательное |
Плоско-параллельное |
Возвратно-вращательное |
Возвратно-вращательное |
Возвратно-поступательное |
|
Кинематические пары в механизме
|
Обозначение пары |
О1 |
А |
В |
О3 |
C |
D |
|
Звенья кинематической пары |
0, 1 |
1, 2 |
2,3 |
0, 3 |
3, 4 |
5, 0 |
|
Вид движения |
В |
В |
П |
В |
В |
П |
|
Особые свойства |
- |
кулисная |
- |
- |
- |
|
|
Обозначение |
А |
С |
|
Вид траектории оси шарнира |
Окружность |
Дуга окружности |
2. Структурный анализ механизма
Структурный анализ механизма проведём для определения класса, порядка и вида структурных групп Л.В. Ассура, входящих в механизм, и для определения класса и порядка механизма.
Определим
число степеней свободы механизма по формуле
П.Л. Чебышева: ![]() , где
, где ![]() - число подвижных звеньев;
- число подвижных звеньев; ![]() - число кинематических пар пятого
класса;
- число кинематических пар пятого
класса; ![]() - число кинематических пар четвёртого
класса.
- число кинематических пар четвёртого
класса.
В
данном случае, ![]() ,
, ![]() ,
,
![]() . Поэтому имеем, что механизм
одноподвижный:
. Поэтому имеем, что механизм
одноподвижный: ![]() .
.
Так как ![]() ,
то представленная кинематическая цепь действительно является механизмом.
,
то представленная кинематическая цепь действительно является механизмом.
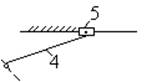
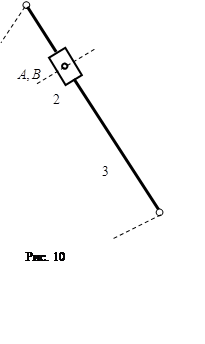
Группа 4 - 5.
 |
|
||||
|
||||
Рис.9
|
|
 |
|||
|
|||
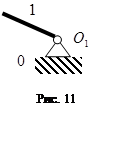
Начальный механизм первого класса.
|
||||
 |
||||
Данный механизм образован путём присоединения к начальному механизму первого класса структурной группы II22.и дальнейшего присоединения структурной группы II33. Таким образом, структурная формула механизма имеет вид: I - II33– II22. Класс механизма равен наивысшему классу структурной группы, входящей в его состав. В данном случае, представленный механизм – механизм второго класса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.