






Федеральное агентство образования Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)

В-3
Выполнил: студент гр. ВД-03 ______________ / /
(подпись) (Ф.И.О.)
Дата: ________
(подпись) (Ф.И.О.)
Санкт-Петербург
2005 г.
Последовательность выполнения работы:
1. Построить 7 планов положения механизма. За
начало отсчета (01 положение) принять положение, соответствующее
началу холостого хода механизма. ![]() начало
отсчета. Все остальные положения, начиная от нулевого, номеруют в
направлении кривошипа. План положений механизма строится в масштабе
начало
отсчета. Все остальные положения, начиная от нулевого, номеруют в
направлении кривошипа. План положений механизма строится в масштабе  .
.
2. Построить 7 планов скоростей механизма в
положениях: 1,2,3,4,0,К. План скоростей механизма строится в масштабе  . По построенным планам
скоростей необходимо вычислить линейные скорости всех характерных подвижных
точек механизма. Для звеньев, совершающих вращательное или сложное движения,
необходимо определить величины и направления угловых скоростей звеньев (
. По построенным планам
скоростей необходимо вычислить линейные скорости всех характерных подвижных
точек механизма. Для звеньев, совершающих вращательное или сложное движения,
необходимо определить величины и направления угловых скоростей звеньев (![]() ). Указать направление
угловой скорости на плане положений (на выделенном положении механизма).
). Указать направление
угловой скорости на плане положений (на выделенном положении механизма).
3. Построить 7 планов ускорений механизма. План
ускорений механизма строится в масштабе  .
Вычислить линейные ускорения всех характерных подвижных точек звеньев
механизма, включая центры масс звеньев. Определить величину и направление
угловых ускорений звеньев, участвующих во вращательном или сложном движениях (
.
Вычислить линейные ускорения всех характерных подвижных точек звеньев
механизма, включая центры масс звеньев. Определить величину и направление
угловых ускорений звеньев, участвующих во вращательном или сложном движениях (![]() ). Нанести направления этих
ускорений на план положений механизма.
). Нанести направления этих
ускорений на план положений механизма.
4. Выполнить кинетостатический анализ механизма, в одном положении на рабочем ходу. Проведем кинетостатический анализ механизма для положения номер 4.
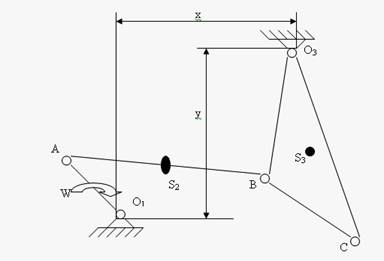
Кинематическое исследование кривошипно-коромыслового механизма.
Тип механизма: 3.
Номер варианта: 5.
|
План положений механизма - это масштабное изображение механизма, выполненное в нескольких положениях ведущего звена. По ведущему звену ведется задание параметров. Построение выполняется методом засечек.
Вычисляем масштаб:
 , где
, где ![]() истинная длина звена (м);
истинная длина звена (м); ![]() чертежное изображение длины
коромысла (мм).
чертежное изображение длины
коромысла (мм).
 ;
;  .
.
Чертежное изображение длин звеньев:
Вычислим скорость  :
: ![]() .
.
 - начальная угловая скорость.
- начальная угловая скорость.
Расчет линейной скорости точки А:

Расчет линейной скорости точки В:
![]()
![]() ^О1А,
^О1А, ![]() ^АВ
^АВ
![]()
![]() ^В3О
^В3О
![]() - относительная скорость;
скорость движения точки В относительно точки А.
- относительная скорость;
скорость движения точки В относительно точки А.
Расчет линейной скорости точки С:
![]() , где
, где ![]() полная скорость точки С;
полная скорость точки С;
![]() точки,
скорости которых равны 0.
точки,
скорости которых равны 0.
Вычислим масштаб:
Точка ![]() полюс.
полюс.
Выберем ![]() - чертежное
изображение
- чертежное
изображение ![]()

Скорость в точки С вычисляем из пропорции 
Пример вычисления скоростей для положения 1:
Угловые скорости звеньев вычисляются по формуле:
Результаты вычислений линейных скоростей подвижных точек механизма за один цикл движения механизма приведены в таблице 4:
Таблица 4 .

1. Векторное уравнение для полного ускорения точки А:
![]()
 нормальная
составляющая полного ускорения точки А.
нормальная
составляющая полного ускорения точки А.
Вычислим масштаб: Точка ![]() полюс.
полюс.
Выберем ![]() - чертежное
изображение
- чертежное
изображение ![]()
 .
.
2. Векторное уравнение для полного ускорения точки В:
3.Векторное уравнение для полного ускорения точки С:
Для первого положения:
Точки пересечения являются графическим решением векторного уравнения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.