






















Министерство общего и профессионального образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В.Плеханова
(технический университет)
КУРСОВАЯ РАБОТА
По дисциплине: Системы управления электроприводами
![]()
![]() (наименование учебной дисциплины согласно учебному плану)
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: Проектирование и расчет системы векторного управления тяговым
![]() электроприводом переменного тока рудничного электровоза
электроприводом переменного тока рудничного электровоза
Автор: студент гр. ЭР-96- 1 _____________ / /
(шифр группы) (подпись) (Ф.И.О.)
ПРОВЕРИЛ:
Руководитель проекта: ____________ _____________ / /
(должность) (подпись) (Ф.И.О)
ОЦЕНКА: ________
ДАТА:___________
Санкт-Петербург
2001г.
В курсовой работе по дисциплине «Системы управления электроприводами» выполнен синтез системы векторного управления тяговыми электродвигателями рудничного электровоза, построена принципиальная схема системы управления, рассчитаны параметры настроек регуляторов системы управления. Исследованы динамические процессы в тяговом электроприводе при пуске, торможении, набросе нагрузки.
Пояснительная записка содержит 31 страницу машинописного текста, включает 9 рисунков, 2 таблицы, 2 приложения, список используемой литературы из 5 наименований.
In course work where are synthesis system of vectorial management of the tractive electrical for mine locomotive, principle scheme of management system, calculated parameters of regulators of the system. Where are dinamical proceses in tractive electrical for start, put on the brakes and sketch of the loading was investigate.
The course work contains an explanatory comment executed on 31 sheets of the printed text, 2 including tables, 9 figures,2 additions, list of the used literature from 5 names.
Введение.............................................................................................................................2
Техническое задание……………………………………………………………
1. Синтез системы управления.................................................................................
1.1 Алгоритм работы электропривода рудничного электровоза............................
1.2 Синтез логического алгоритма работы системы управления...........................
2. Математическая модель тягового асинхронного электродвигателя ................
3. Математическая модель системы регулирования...............................................
3.1 Расчет параметров настроек регуляторов системы регулирования...................
3.1.1 Расчет регуляторов канала регулирования потокосцепления ротора двигателя.................................................................................................................
3.1.2 Расчет регуляторов канала регулирования скорости двигателя........................
4. Цифровое управление............................................................................................
Заключение..........................................................................................................................
Список используемой литературы.....................................................................................
В настоящее время рудничные электровозы оснащены электроприводами постоянного тока на основе машин с последовательным возбуждением. При всех положительных качествах существующих электроприводов, они обладают рядом существенных недостатков, а именно машина нуждается в постоянном обслуживании и ремонте в связи с наличием щеточно-коллекторного узла.
Регулирование скорости электровоза связано с большими непроизводственными потерями электроэнергии. Существующая на сегодняшний день мировая практика говорит о том, что наиболее перспективным тяговым электроприводом является асинхронный электропривод с преобразователем частоты. Внедрение такого типа привода до настоящего времени было затруднено отсутствием достаточно надежного и компактного преобразователя частоты. Появление в последние годы силовых транзисторных модулей IGBT позволило эту проблему снять, а современные контроллеры построенные на быстродействующих DSP-процессорах позволяют осуществлять управление силовой частью преобразователя в реальном масштабе времени.
Развитие средств вычислительной техники и внедрение их в системы автоматического управления определяет новый этап в развитии систем автоматизированных электроприводов, в частности с двигателями переменного тока. Возможность контроля и управления текущими координатами машин переменного тока в различных пространственных осях отсчета открыло новые возможности развития и совершенствования регулируемых электроприводов переменного тока.
Для управления асинхронным ТЭД применяют преобразователи частоты, формирование выходных сигналов которых осуществляется на основе широтно-импульсной модуляции (ШИМ). На выходе преобразователя формируется серия прямоугольных импульсов постоянной амплитуды, но меняющейся длительности. Полезная составляющая напряжения имеет форму синусоиды заданной частоты и амплитуды.
В настоящее время, как правило, в качестве ключевого элемента в инверторах применяют биполярные транзисторы с изолированном затвором (IGBT), имеющие длительность фронта импульсов в диапазоне 0,1-1,0 мкс.
1. Синтез системы управления
Синтез системы управления электроприводом осуществляется следующими этапами:
1. По техническому заданию или словесному алгоритму работы электропривода составляется программа его работы
2. Одним из методов (например, методом циклограмм) синтезируются логические алгоритмы работы системы управления
3. Методами и правилами алгебры-логики алгоритм совершенствуется с целью сокращения аппаратных средств его реализации
4. Выбираются аппаратные средства с помощью которых реализуется логический алгоритм
В соответствии с техническим заданием (см. Приложение 1) и словесным алгоритмом работы электропривода рудничного электровоза представленном ниже, построим логический алгоритм работы автоматики.
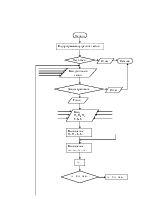
1.1 Алгоритм работы электропривода рудничного электровоза
Пусть в исходном положении электровоз отключен от контактной сети автоматическим выключателем QF, все органы управления установлены в исходные положения.
1) Включаем QF который при отсутствии короткого замыкания в цепи питания инвертора остается во включенном состоянии и подает напряжение на инвертор - загорается индикаторная лампа "Питание" на пульте управления машиниста (ПУМ). Начинает выполняться внутренний тест системы управления, который включает тест внутренних регистров и памяти микроконтроллера и правильность выполнения арифметических операций. Если тест прошел без ошибок и ни одна из защит инвертора
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.