Типовые устройства для обеспечения траектории простых исполнительных движений.
-
Вращательное движение.
-
Внутренняя связь – кинематическая пара «шпиндель - подшипники».
-
Основные требования к опорам шпинделя:
-
Точность вращения.
-
Возможность компенсации износа.
-
Большая грузоподъемность (жесткость).
-
Малые потери на трение.
Типовые устройства для обеспечения траектории простых исполнительных движений.
-
Вращательное движение.
-
Внутренняя связь – кинематическая пара «шпиндель - подшипники».
-
Основные требования к опорам шпинделя:
-
Точность вращения.
-
Возможность компенсации износа.
-
Большая грузоподъемность (жесткость).
-
Малые потери на трение.
-
В качестве опор шпинделей используются как подшипники качения, так и подшипники скольжения. Основным является первый тип опор (90 % всех станков), однако их точность ограничена 1…2 мкм.
Типовые устройства для обеспечения траектории простых исполнительных движений.
-
Вращательное движение.
-
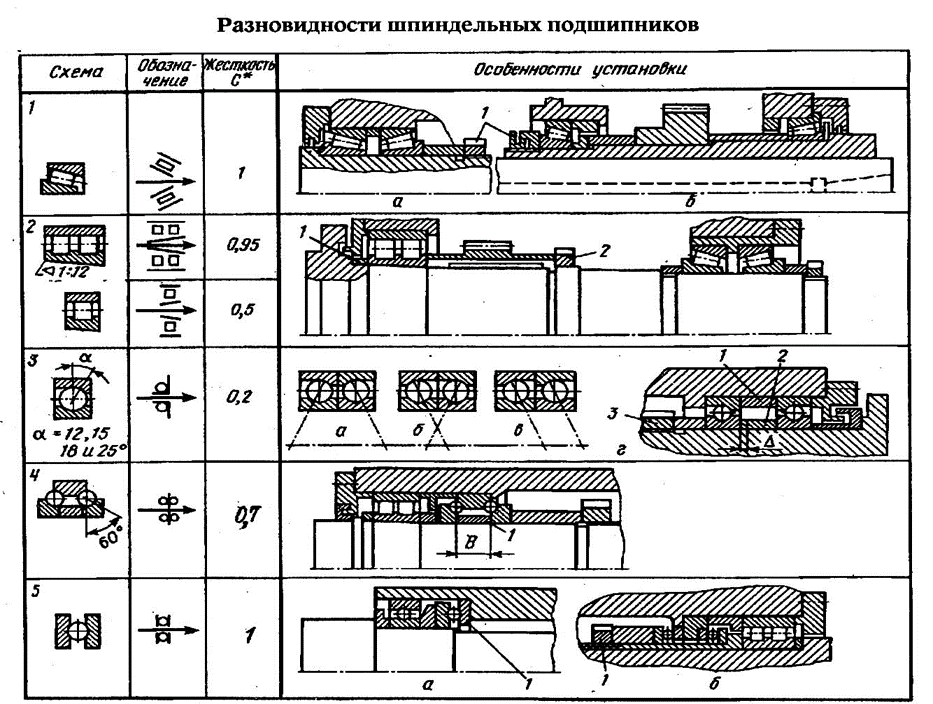
Подшипники качения для шпинделей являются специальными повышенных классов точности:
-
Повышенный (П).
-
Высокий (В),
-
Особовысокий (А).
-
Сверхвысокий (С).
( )
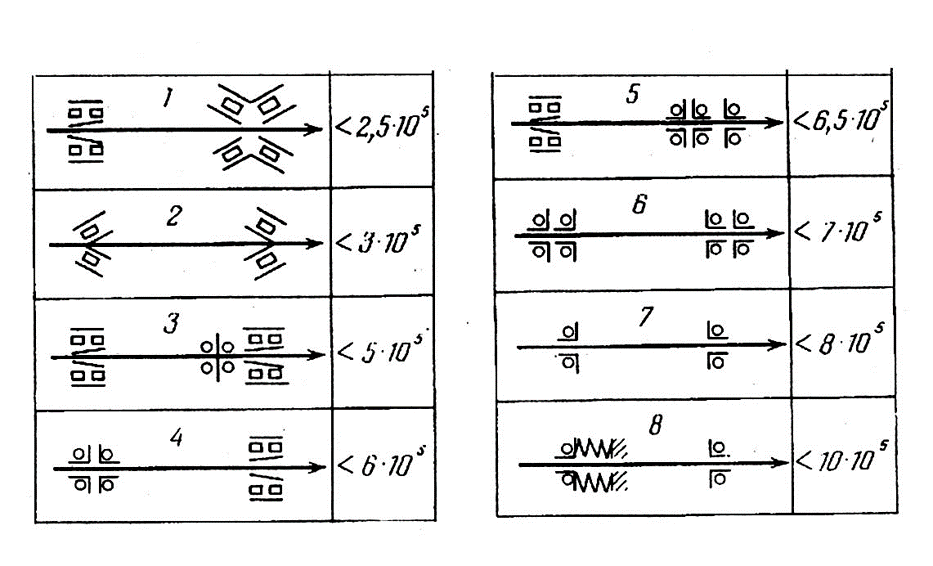
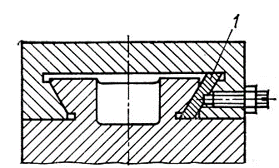
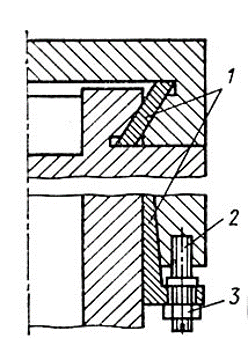
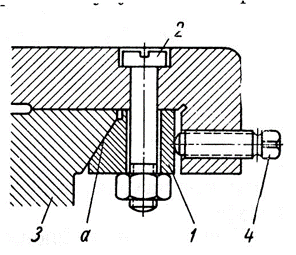
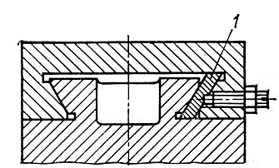
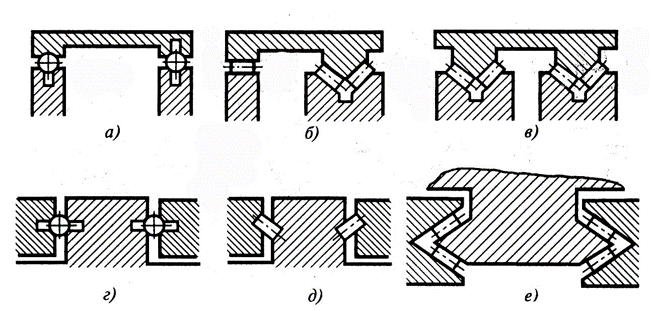
Типовые конструктивные схемы расположения подшипников качения
( , )
Подшипники скольжения
-
Подшипники скольжения:
-
Обеспечивают большую точность вращения шпинделя.
-
Имеют высокую виброустойчивость.
-
Обладают высокими демпфирующими свойствам.
-
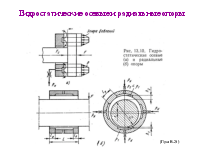
Наиболее часто используются гидростатические и гидродинамические опоры (опоры жидкостного трения)
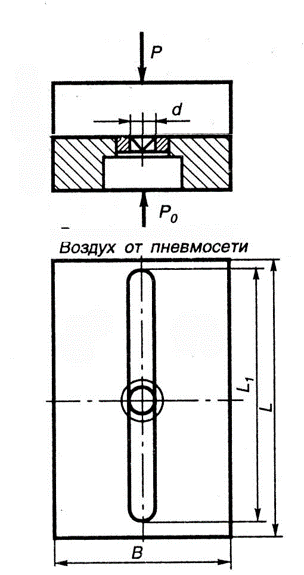
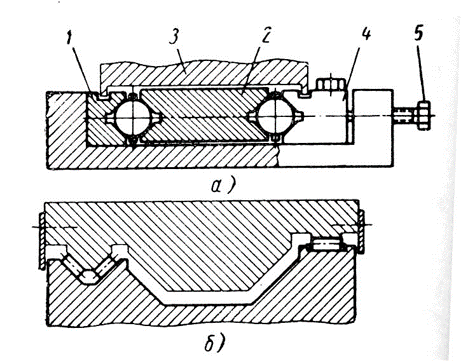
Гидростатические осевые и радиальные опоры
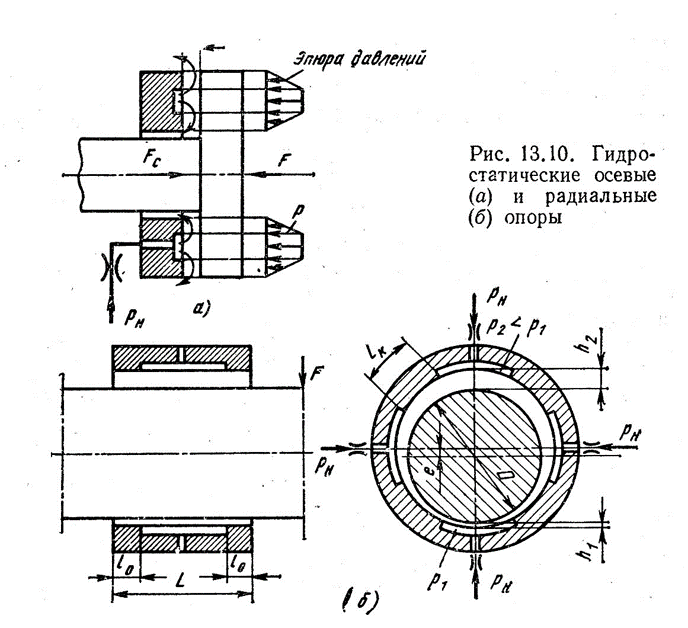
( )
Типовые устройства для обеспечения траектории простых исполнительных движений.
-
Поступательное движение.
-
Внутренняя связь – кинематическая пара «ползун - направляющие».
-
Направляющие так же бывают двух типов – качения и скольжения. Наибольшее распространение получили направляющие скольжения со смешанным трением.
-
Основные достоинства:
-
Простота конструкции.
-
Низкая стоимость изготовления.
-
Высокая контактная жесткость и демпфирующая способность.
-
Для исключения возможности отклонения исполнительных органов от заданной траектории направляющие делают замкнутыми.
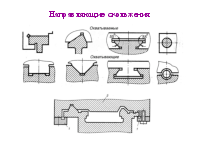
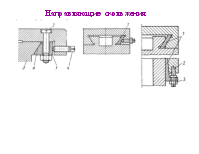
Направляющие скольжения
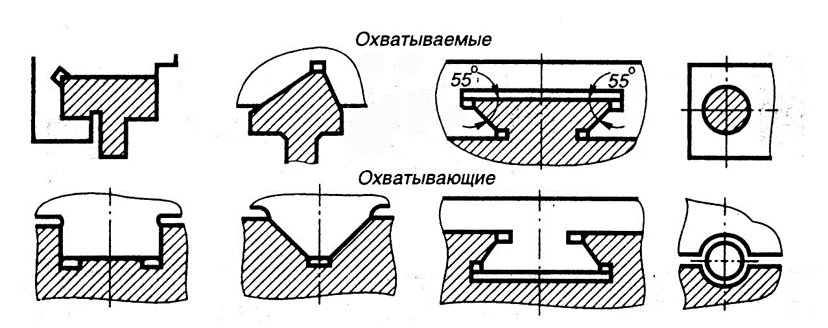
Направляющие скольжения
Направляющие скольжения
-
Недостатки:
-
Низкая износостойкость в связи с преобладанием полусухого трения (f =0,1…0,3).
-
Имеют склонность к скачкообразному движению при малых скоростях, т.к. коэффициент трения покоя существенно отличается от коэффициента трения при движении
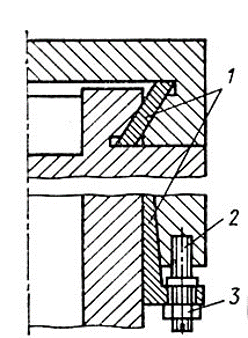
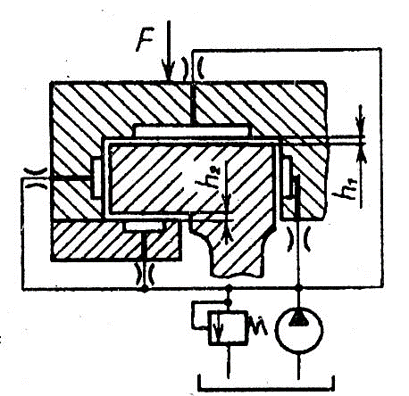
Направляющие скольжения с гидроразгрузкой
-
Достоинства:
-
Часть нагрузки воспринимается давлением масла (f =0,05…0,08).
-
Повышается долговечность, уменьшается скачкообразность движения.
-
Недостатки:
-
Механическое трение полностью не устраняется
-
Направляющие не замкнуты.
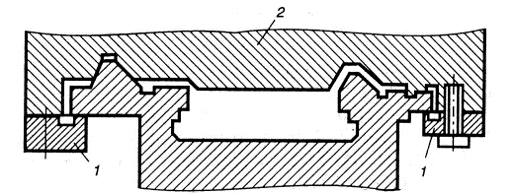
Направляющие скольжения гидродинамические и гидростатические
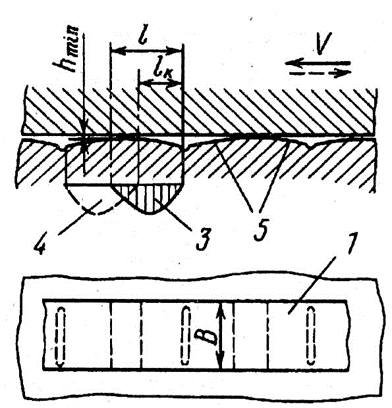
h порядка 0,02 мм, коэффициент трения f = 0,0008
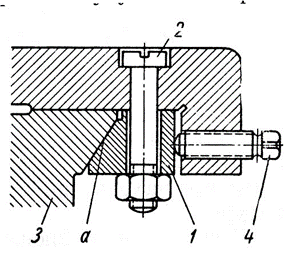
Направляющие качения
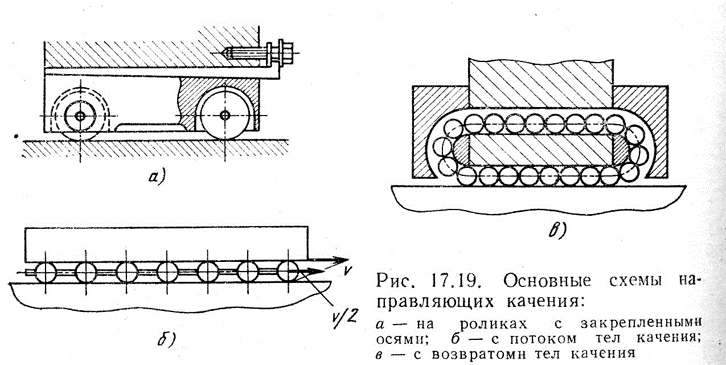
-
Достоинства:
-
Плавность движения.
-
Высокая точность и жесткость
-
Высокий КПД (f = 0,005…0,05)
-
Большая долговечность
Направляющие качения
Типовые устройства для настройки скорости.
-
Регулирование скорости исполнительных движений может осуществляться:
-
механически,
-
электрически,
-
гидравлически
-
комбинированно.
-
Основной характеристикой этих устройств является диапазон регулирования скорости – отношение максимального значения скорости к минимальному.
-
По виду регулирования скорости приводы могут быть
-
ступенчатые;
-
бесступенчатые (плавные).
Ступенчатое регулирование скорости.
-
Достоинства:
-
Жесткость характеристики.
-
Высокий КПД.
-
Большая надежность в работе.
-
Простота эксплуатации.
Ступенчатое регулирование скорости.
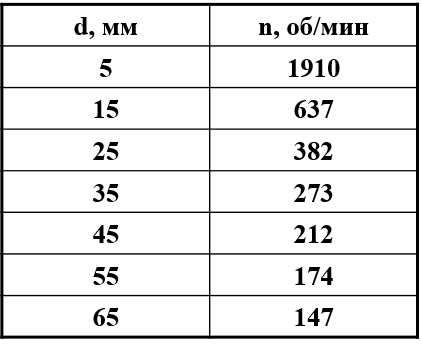
Точение цилиндрической поверхности диаметром d, со скоростью резания V=30 м/с
Ступенчатое регулирование скорости.
Числа оборотов при ступенчатом регулировании скорости образуют геометрическую прогрессию со знаменателем ряда φ:
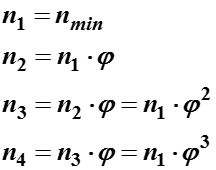
Знаменатели ряда φ и значения чисел геометрических рядов устанавливаются по нормали Н11-1 и ГОСТ 8032-84 .
φ = 1,06 – 1,12 – 1,26 – 1,41 – 1,58 -1,78 – 2 (Н11-1)
φ = 1,06 – 1,12 – 1,25 – 1,6 (ГОСТ 8032-84)
Ступенчатое регулирование скорости.
С использованием многоскоростных электродвигателей
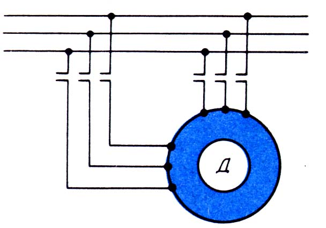


-
Достоинства:
-
Существенно упрощает конструкцию коробок скоростей
-
Недостатки:
-
Увеличение габарита двигателя
-
Падение мощности на валу двигателя
Ступенчатое регулирование скорости.
Ступенчатые шкивы
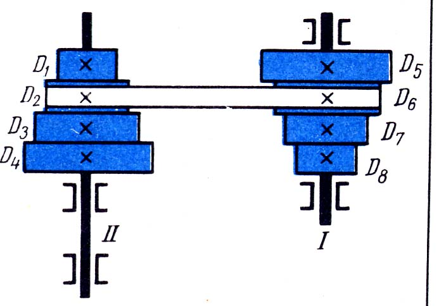


Достоинства: 1. Равномерная безвибрационная работа на больших скоростях 2. Компактность.
Недостатки: 1. Непостоянство передаваемой мощности 2. Длительность переналадки
Ступенчатое регулирование скорости.
Парносменные колеса (гитары)
Однопарные
для главного привода для привода подач