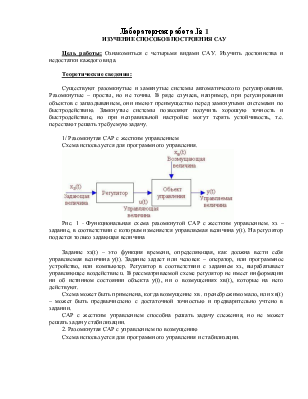
Схема используется для слежения, программного управления и стабилизации.
В такой системе регулятор в процессе управления учитывает как задание, так и реальное состояние объекта, а, кроме того, косвенно учитывает и возмущение.
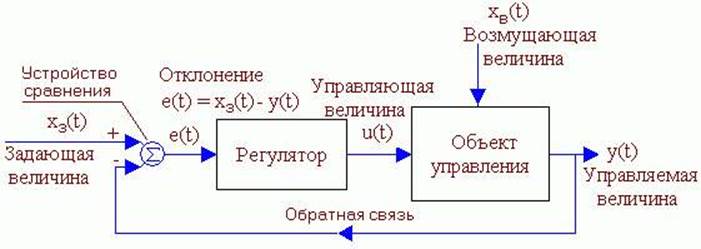
Рис. 3 - Функциональная схема замкнутой САР с управлением по отклонению. e(t) – отклонение (ошибка слежения, регулирования) управляемой величины y(t) от задания хз(t).
Сравнивающее устройство (сумматор) сравнивает задающую и управляемые величины и вычисляет отклонение, ошибку регулирования e(t) = хз(t) - y (t).
Регулятор – вырабатывает такое управляющее воздействие u(t) на объект управления, которое сводит ошибку к нулю или допустимому минимуму. В идеале, когда e = 0, хз(t) = y (t)
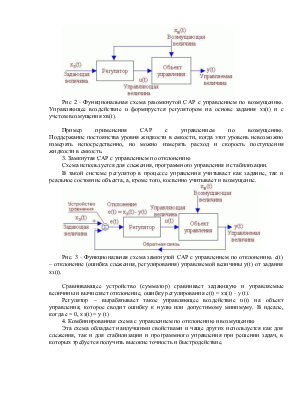
4. Комбинированная схема с управлением по отклонению и возмущению
Эта схема обладает наилучшими свойствами и чаще других используется как для слежения, так и для стабилизации и программного управления при решении задач, в которых требуется получить высокие точность и быстродействие.
Рис. 4 - Функциональная схема САР с комбинированным управлением по отклонению и по возмущению
Возмущение измеряется непосредственно или косвенно и подается на регулятор для коррекции управляющей величины, что позволяет быстро в значительной мере компенсировать влияние возмущения на управляемую величину. Недокомпенсацию существенно уменьшает контур управления по отклонению, который в итоге и обеспечивает требуемую точность слежения.
Ход работы
1. Параметры характеризующие САУ
Параметры характеризующие САУ: быстродействие (),чувствительность к изменению параметров системы, погрешность слежения q% в следящих системах
где x – величина входного воздействия.
y – величина выходного воздействия.
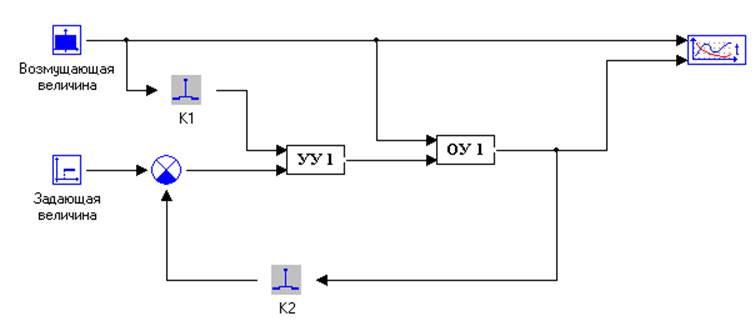
Рисунок 5 –
2. Влияние возмущения на выходной сигнал САУ
2.1 Собрать схему рис. 5.
В ней реализованы все четыре вида САУ, зависящих от положения ключей К1 и К2. В качестве «возмущения» используется Генератор равномерного шума. В его свойствах следует установить следующие параметры: ymin=0; ymax=0.5.
Можно создать четыре варианта данной САУ:
1) Ключи К1 и К2 разомкнуты;
2) К1 замкнут, К2 разомкнут;
3) К1 разомкнут, К2 замкнут;
3) К1 и К2 замкнуты.
Какой тип САР реализуется в каждом из этих вариантов?
2.2 Запустите моделирование и определите «размах» (амплитуду шума на выходном сигнале САУ во всех вариантах..
3. Влияние обратной связи на погрешность и быстродействие САР
3.1 Откройте файл морпо2.mrj
Из общей теории систем с обратной связью известно, что коэффициент передачи систем с ООС
где К – коэффициент передачи системы прямого канала без ООС,
β – коэффициент передачи канала ОС.
В следящих САР β=1, поэтому
Параметр ![]() называется глубиной ОС. В схеме
этот параметр задается в блоке Объекте управления (ОУ2).
называется глубиной ОС. В схеме
этот параметр задается в блоке Объекте управления (ОУ2).
Качество работы следящей САР определяется в первую очередь быстродействием ty и погрешностью q. Параметр ty определяется как время, в течение которого сигнал на выходе САР достигает 0,95 от своего установившегося значения.
Погрешность q находится по формуле .
3.2 Разомкните ключ К1 и определите по осциллограмме параметр ty,а по пульту управления погрешность q при разной глубине ООС для значений х=1 и 5. Результаты занесите в таблицу.
|
х |
А=2 |
А=10 |
А=100 |
|||
|
ty |
q |
ty |
q |
ty |
q |
|
|
1 |
||||||
|
5 |
||||||
Замкните ключ К1 и определите параметры ty и q для разных значений х и А. Результаты занесите в таблицу.
Сделайте вывод о влияние ОС на быстродействие и погрешность системы. Влияет ли величина входного сигналана качество раьоты системы?
4. Определите чувствительность параметров САР при изменении свойств элементов системы.
Чувствительность параметра V от
параметра Z определяется формулой  , иначе
, иначе  , где
, где ![]() и
и ![]() - относительные изменения параметров
v и z.
- относительные изменения параметров
v и z.
Объект управления ОУ2
характеризуется двумя параметрами: коэффициентом передачи К и инерционностью Т.
Определить чувствительность ![]() и
и ![]() без ОС (А=1) и с ОС (А=5)
без ОС (А=1) и с ОС (А=5)
Для определения чувствительности рекомендуется изменить К, затем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.