|
|
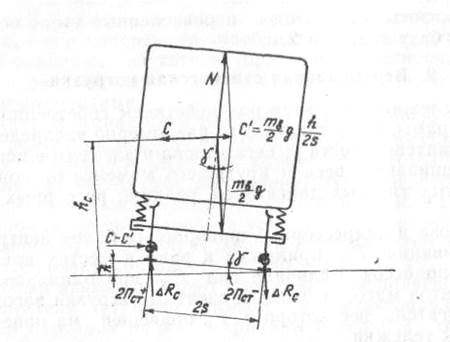
Рисунок 2 – Направление сил при движении в кривой
Величина центробежной силы (кН) в расчете на одну тележку
 , (5)
, (5)
где V – скорость движения, км/ч; по заданию V=120 км/ч;
ρ – радиус кривой, м; по заданию ρ = 200 м.
 кН.
кН.
В кривой с возвышением наружного рельса линии действия веса
 .
(6)
.
(6)
 кН.
кН.
и нормальной реакции опоры N не совпадают, а пересекаются под углом γ, поэтому в поперечном направлении действует сила
 , (7)
, (7)
где h – возвышение наружного рельса, м; по заданию h = 0,15 м;
2s – расстояние между кругами катания колёс, м; по заданию2s= 1,6 м.
 кН.
кН.
Сила С’ частично компенсирует силу С, так что такое же по величине значение силы СВ в кривой с возвышением достигается при большей скорости движения
CВ = C – C’. (8)
CВ = 179,4 – 30,3 = 149,1 кН.
Опрокидывающий момент в кривой с возвышением от силы СВ
![]() , (9)
, (9)
где
 ,
(10)
,
(10)
где 0,5 тВ – масса вагона в расчете на одну тележку, т;
![]() –
высоты расположения центров масс кузова, подрессо
ренных масс тележки и неподрессоренных
масс колесных пар над уровнем головок
рельсов, м;
–
высоты расположения центров масс кузова, подрессо
ренных масс тележки и неподрессоренных
масс колесных пар над уровнем головок
рельсов, м;
mк – масса кузова прицепного вагона, которая находится как разность масс вагона, тележек и неподрессорен ных масс , т;
mр – масса рамы тележки, т; mр = 7 т[1];
mнп – масса неподрессоренных частей , mнп = 1,5 т[1].
mк= 64,6 – 2·7 – 4·1,5 = 44,6 т. (11)
 м.
м.
![]() кН·м.
кН·м.
Считают, что безопасность движения обеспечивается, если опрокидывающий момент меньше восстанавливающего момента от силы тяжести на плече s с коэффициентом запаса 2
![]() , (12)
, (12)
где
 . (13)
. (13)
 кН·м.
кН·м.
Тогда из условия (12) для обеспечения безопасности движения опрокидывающий момент должен быть равен
![]() кН·м.
кН·м.
Из выражений (9), (8), (5) для данного значения опрокидывающего момента определим значение максимально допустимой скорости движения электропоезда ЭР9 в кривой заданного радиуса. После проведённых преобразований и вычислений получили, что максимальная скорость движения электропоезда в кривой не может превышать 90 км/ч.
1.5 Силы, действующие на тележку при движении в кривой
При входе в кривую на переднее наружное колесо со стороны наружного рельса начинает действовать направляющее усилие Y1, которое понуждает экипаж двигаться по окружности вокруг центра кривой O. Вписывание тележки в кривую показано в графическом приложении ( лист 2 ). Экипаж, двигавшийся с линейной скоростью V, начинает вращаться вокруг точки О с угловой скоростью
 , (14)
, (14)
где ρ – радиус вращения, т. е. перпендикуляр, опущенный из центра кривой на продольную ось экипажа. Основание перпендикуляра – точка Ω,
 с-1.
с-1.
Абсолютная скорость Vабс любой точки тележки, в частности центра переднего внутреннего колеса А, направлена перпендикулярно радиусу, проведенному из точки О в данную точку, и равна по величине
![]() . (15)
. (15)
Величины и направления
абсолютных скоростей всех точек тележки будут различны. Для
дальнейших рассуждений и расчетов удобно представить
абсолютную скорость каждой точки как сумму переносной и относительной
скоростей. Нам известна величина и направление скорости Vв точке Ω. Тогда можно
выразить абсолютную скорость точки А ![]() как векторную
сумму переносной скорости
как векторную
сумму переносной скорости ![]() в точке Ωи относительной скорости точки А во вращательном движении
ее вокруг точки Ω
в точке Ωи относительной скорости точки А во вращательном движении
ее вокруг точки Ω
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.