Одним из критериев помехоустойчивости может выступать так называемый минимум среднеквадратичного отклонения, т.е. максимальное приближение передаваемого и принимаемого сигналов. На языке математики этот критерий выглядит так:
 (4.1)
(4.1)
где ![]() –
исходный сигнал;
–
исходный сигнал;
![]() –
сигнал с помехой.
–
сигнал с помехой.
Однако эта формула больше подходит для непрерывных сигналов, т.к. оценивает квадрат разности напряжений, а квадрат напряжения это мощность. Оценка же мощностей двух дискретных сигналов не имеет смысла, т.к. при равной мощности сигнала могут быть совершенно различны.
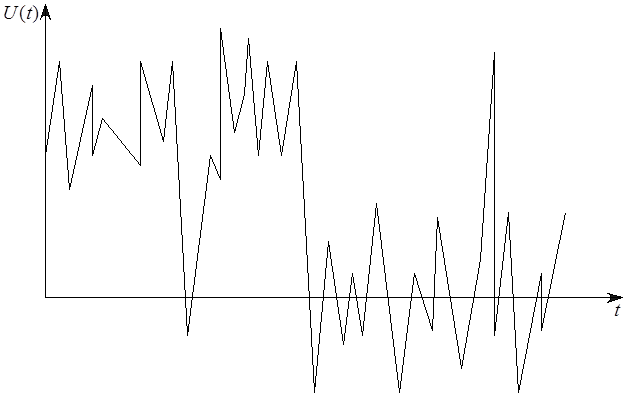
Если мы имеем дело с дискретными сигналами, то, очевидно, что правильность приема сигнала сильно зависит от критерия принятия решения о том, какой же пришел сигнал: низкого уровня или высокого. Действительно в отдельные моменты времени значение выходного сигнала в условиях помех может не правильно описывать передаваемое. Однако в некоторых случаях даже человеческий глаз может различить, что здесь лишь помеха, а не смена полярности (см. рис. 4.1).
В таком случае необходимо вводить
вероятностные оценки шума, правильности принимаемого сигнала и т.д. Обозначим  – вероятность того, что при
значении сигнала на приемном конце равное
– вероятность того, что при
значении сигнала на приемном конце равное ![]() истинное
значение передаваемого сигнала равно
истинное
значение передаваемого сигнала равно ![]() . Примем так же,
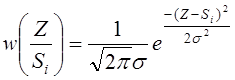
что шумы в канале распределены по нормальному закону (Гауссово распределение),
т.е. дифференциальная функция распределения (или плотность вероятности) имеет
вид изображенный на рисунке 4.2
. Примем так же,
что шумы в канале распределены по нормальному закону (Гауссово распределение),
т.е. дифференциальная функция распределения (или плотность вероятности) имеет
вид изображенный на рисунке 4.2
|
|
 (4.2)
(4.2)
где ![]() –
среднеквадратичное отклонение.
–
среднеквадратичное отклонение.
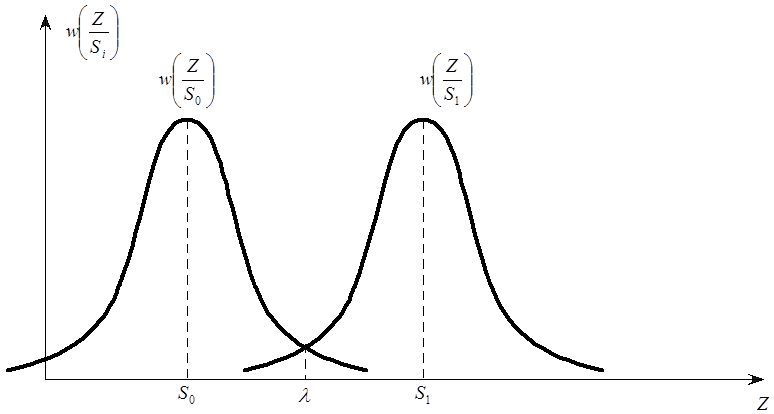
В таком случае на приемном конце будет ситуация, изображенная на рисунке 1.3.
Каждая точка кривой выражает
вероятность того, что при заданном значении принимаемого сигнала передаваемый
был ![]() , т.е. .
На рисунке видно, что кривые
, т.е. .
На рисунке видно, что кривые  и
и  пересекаются при значении
пересекаются при значении ![]() .
.
Критерий оценки, при котором сигнал с
вероятностью больше ![]() принимается равным
единицы, а меньше
принимается равным
единицы, а меньше ![]() принимается равным нулю
называется критерием Котельникова или критерием «идеального наблюдателя».
Вероятность ошибки в таком случае определяется площадью лежащей ниже обеих
прямых, и определяется как:
принимается равным нулю
называется критерием Котельникова или критерием «идеального наблюдателя».
Вероятность ошибки в таком случае определяется площадью лежащей ниже обеих
прямых, и определяется как:
 (4.3)
(4.3)
Куда бы мы не смещали ![]() (соответственно меняя пределы
интегрирования), вероятность ошибки будет лишь возрастать. Поэтому еще одно
название данного критерия – критерий минимума вероятности ошибки.
(соответственно меняя пределы
интегрирования), вероятность ошибки будет лишь возрастать. Поэтому еще одно
название данного критерия – критерий минимума вероятности ошибки.
Хотя руководствуясь данным критерием
можно достичь минимальной ошибки его используют не всегда, а именно когда,
например, вероятность ложного спокойствия –  должна
быть несопоставима меньше чем вероятность ложной тревоги –
должна
быть несопоставима меньше чем вероятность ложной тревоги – (например при обнаружении объекта
противника радаром ближнего действия), в этом случае
(например при обнаружении объекта
противника радаром ближнего действия), в этом случае ![]() сдвигают
влево. При других обстоятельствах возможно уменьшение вероятности ложной
тревоги.
сдвигают
влево. При других обстоятельствах возможно уменьшение вероятности ложной
тревоги.
Однако мы будем руководствоваться критерием «идеально наблюдателя». Найдем для этого случая вероятность ошибки с учетом (4.3) и (4.2) имеем:

Учитывая свойства функции распределения вероятности, и произведя математические преобразования, получим:
 , где
, где  (4.4)
(4.4)
Функция ![]() получила
название функции Крампа, она табулирована.
получила
название функции Крампа, она табулирована. ![]() в
этой формуле это соотношение сигнал/шум находится как:
в
этой формуле это соотношение сигнал/шум находится как:
 (4.5)
(4.5)
 (4.6)
(4.6)
Используя (4.4), (4.5) и (4.6) рассчитываем:
 Гц
Гц
![]()

Таким образом, можно построить график зависимости вероятности ошибки от соотношения сигнал/шум (см. рисунок 4.3).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
