2.2 Симетричні неявнополюсні електричні машини
б)
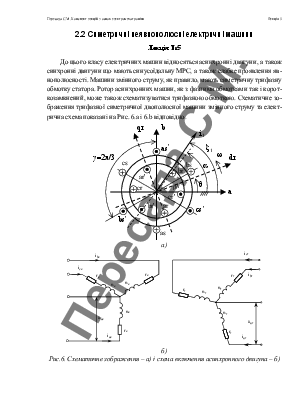
Рис.6. Схематичне зображення – а) і схема включення асинхронного двигуна – б) На рисунку розподілені статорні і роторні обмотки замінено їх центральними витками. Кут α є координатою статора відносно магнітної осі статорної обмотки as, що одночасно є віссю (а) стаціонарної ортогональної системи координат, (а–b). Центри обмоток bs і cs розташовані відносно осі першої статорної обмотки відповідно на кутах α=γ=2π/3 і α=2γ=4π/3. Таке саме визначення характерне і для роторного кола. З цих визначень кут обертання ротора θ – це кут між напрямками магнітних осей статорної as і роторної ar обмоток, що відраховується відносно системи (а–b), жорстко зв'язаної із статором. Розташувавши при цьому на роторі систему координат (dr–qr) так, що вісь (dr) співпадає з магнітною віссю роторної обмотки ar, одержимо визначення кута обертання θ, яке розглянуто в двофазній моделі узагальненої машини. Трифазні обмотки статора і ротора є симетричними, тобто мають однакову кількість витків (ns, nr) і однаковий активний опір (Rs, Rr) для кожної із фазних обмоток. Струми статора (ротора) можуть мати будь-яку форму.
Якщо кількість витків на кожну фазу статора дорівнює ns, то розподіл МРС обмоток статора вздовж довжини кола машини, промаcштабований коефіцієнтом 2/3, визначається залежністю
F t,1 , # %- 23 ns .2ias ,t cos- #0ibs ,t cos- ,#1$-0ics ,t cos- ,#12$-/3; (19)
$% ’2 3.
Відповідно до Рис. 7 F1(t, α) є статорними ампер-витками, що прикладені до повітряного зазору по радіальній лінії магнітного поля, яка перетинає двигун під кутом α. Якщо статорні струми синусоїдальні, з постійною амплітудою і частотою, й утворюють симетричну трифазну систему, тобто
i (t)as 0i (t)bs 0i (t)cs % 0, (20) то хвиля МРС має сталу амплітуду й обертається із сталою кутовою швидкістю, що дорівнює частоті статорних струмів.
b 1 F ( ,t)1 #
2
Повітряний зазор
#
a
1 F ( ,t)1 #
2
Рис. 7. Визначення МРС статорних обмоток.
Введемо комплексне визначення
cosα = (ejα + e–jα) (21) тоді вираз (19) матиме вигляд:
F1 ,t,# %- 1 n 42
2 S 563 .2ias ,t-0ibs ,t e- j$ 0ics ,t e- j2$/3e1j# 0 (22)
0 2 .2ias ,t-0ibs ,t e- 1j$ 0ics ,t e- 1j2$/3ej#798, 3
в якому
i1,t- % ,ias ,t-0ibs ,t e- j$ 0ics ,t e- j2$-, (23) змінний у часі вектор струму статора в комплексній площині, зв'язаній із системою координат (а – b), а
i*1,t- % ,ias ,t-0ibs ,t e- 1j$ 0ics ,t e- 1j2$ -, (24) являє собою відповідний сполучений комплексний вектор.
Вираз для МРС статора (22) з урахуванням позначень (23), (24)має вигляд:
F1 ,t,# %- 12 nS .2i1 ,t e- 1j# 0i1*(t)ej#/3.
Спосіб одержання комплексного вектора статора i1(t) зображено на Рис. 8 для моменту часу, коли ias(t)>0, ibs(t)<0, ics(t)<0. З урахуванням введеної раніше системи відрахунку, зв'язаної із статором електричної машини, комплексний вектор струму статора запишемо
i1(t) % I (t)e1 j*1(t) % i (t)1a 0 ji (t)1b (25)
де I1(t), ξ1 – модуль і кутове положення вектора i1; i1a(t), i1b(t) – проекції вектора, струму статора в системі координат (а-b) комплексної магнітної площини, зв'язаної з статором машини. Нагадаємо, що дійсна вісь а співпадає з напрямком магнітної осі as статорної обмотки.
b
ej$
i1b i1
$ 1 i ecs j2$
$ *
iаs i1a а ej2$ i ebs j$
Рис. 8. Формування вектора струму статора.
Рівняння (25) описує перетворення трифазних змінних на еквівалентні двофазні. З Рис. 8., використовуючи метод симетричних складових, одержимо
iab01 % Qiabcs (26)
де
iab01 %,i ,i ,i1a 1b 10 -T ;iabcs %,i ,i ,ias bs cs -T (27)
::.1 112 112 ;;/ ::. 1 0 1;;/
Q % 32 ::2::102 1223 11223;;;;3;; Q11 % 1:::2::11122 1 2323 11;;;3;; (28)
:
У виразі (27) для перетвореного вектора струму статора i10 є складовою нульові послідовності. Якщо трифазні змінні утворюють симетричну систему (20), то складові нульової послідовності відсутні і матриця (27) набуває вигляду.
. /
Q %<3> 2=% 23 :2:.::032 203 1 203;;3;/;; Q11 %<2 > 3=% 1:::2::::111122 1 02323;;;3;;;; (29)
Перетворення трифазних змінних ротора до двофазних виконується аналогічно.
У загальному вигляді перетворення трифазних змінних до двофазних може бути записано таким чином
xxab0dq021 %%QxQxabcsabcr (30)
де xab01 %,x ,x ,x1a 1b 10 -T , xdq02 %,x2dr,x2qr,x20 -T – вектори двофазних змінних статора і ротора; xabcs %,x ,x ,xas bs cs -T ; xabcr %,x ,x ,xar br cr -T – вектори трифазних змінних статора і ротора. Вектор x в (30) використовується для визначення векторів напруг, струмів та потокозчеплень електричної машини.
Не важко пересвідчитись у тому, що перетворення (28) зберігає амплітуду вектора, записаного в двофазних і трифазних змінних, в той час як співвідношення потужностей знаходяться з наступного аналізу. Потужність записана через трифазні і двофазні змінні є
|
Pabcs % uTabcs abcsi % u ias as 0 u ibs bs 0 u ics cs |
(31) |
|
Pab01 % uTab01iab01 % u i1a 1a 0 u i1b 1b 0 2u i01 01 |
(32) |
Оскільки потужності в (31) і (32) мають бути однаковими при використанні перетворення (28), то їх співвідношення знаходиться у вигляді
(33)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.