Розділ 2. Математичний опис у двофазних змінних
2.1. Поняття про узагальнену електричну машину
 Математичний
опис електричної частини багатофазних електричних машин вміщує n+m рівнянь
електричної рівноваги відносно кількості фазних обмоток (див. останнє векторне рівняння
(7)). У теорії ідеалізованих електричних машин математичний опис процесів електромеханічного
перетворення енергії можна істотно спростити в результаті переходу до еквівалентної
двофазної моделі. Основним тут є припущення про можливість розгляду магнітного поля
в повітряному зазорі як двомірного, тобто розглядати його в площині, перпендикулярній
осі машини, вважаючи, що при русі цієї площини вздовж осі машини картина поля не
змінюється. В цьому випадку магніторушійну силу (МРС) будь-якої багатофазної обмотки
можна одержати за допомогою двох еквівалентних взаємно перпендикулярних обмоток,
тобто багатофазна електрична машина має еквівалентну двофазну модель. Можливість
такої заміни дає змогу одержати узагальнений математичний опис процесів електромеханічного
перетворення енергії для обертальних електричних машин за допомогою ідеалізованого
двофазного електромеханічного перетворювача, який називають узагальненою
електричною машиною.
Математичний
опис електричної частини багатофазних електричних машин вміщує n+m рівнянь
електричної рівноваги відносно кількості фазних обмоток (див. останнє векторне рівняння
(7)). У теорії ідеалізованих електричних машин математичний опис процесів електромеханічного
перетворення енергії можна істотно спростити в результаті переходу до еквівалентної
двофазної моделі. Основним тут є припущення про можливість розгляду магнітного поля
в повітряному зазорі як двомірного, тобто розглядати його в площині, перпендикулярній
осі машини, вважаючи, що при русі цієї площини вздовж осі машини картина поля не
змінюється. В цьому випадку магніторушійну силу (МРС) будь-якої багатофазної обмотки
можна одержати за допомогою двох еквівалентних взаємно перпендикулярних обмоток,
тобто багатофазна електрична машина має еквівалентну двофазну модель. Можливість
такої заміни дає змогу одержати узагальнений математичний опис процесів електромеханічного
перетворення енергії для обертальних електричних машин за допомогою ідеалізованого
двофазного електромеханічного перетворювача, який називають узагальненою
електричною машиною.
b
! dr
i1b u1b
qr i2qr i2dr
u2qr u2dr
! i1a a
u1a
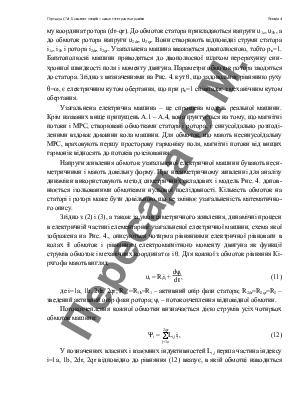
Рис. 4. Схема елементарної узагальненої двофазної машини.
 У
статор і ротор елементарної узагальненої електричної машини вміщують по дві взаємно
перпендикулярні обмотки, зв'язані відповідно із статором (обмотки а і b) та ротором
(dr і qr), Рис. 4. При цьому індекс (1) або (2) вказує на належність відповідно
до статора або ротора. Відповідно до такої схематизації визначають нерухому систему
координат статора (a–b) і обертаючу разом із ротором – систему координат ротора
(dr–qr). До обмоток статора прикладаються напруги u1a, u1b,
а до обмоток ротора напруги u2dr, u2qr. Вони створюють відповідні
струми статора i1a, i1b і ротора i2dr, i2qr.
Узагальнена машина вважається двополюсною, тобто pn=1. Багатополюсні
машини приводяться до двополюсної шляхом перерахунку синхронної швидкості поля і
моменту двигуна. Параметри обмоток ротора зводяться до статора. Згідно з визначеннями
на Рис. 4. кут θ, що задовольняє рівнянню руху θ·=ω, є електричним кутом обертання,
що при pn=1 співпадає з механічним кутом обертання.
У
статор і ротор елементарної узагальненої електричної машини вміщують по дві взаємно
перпендикулярні обмотки, зв'язані відповідно із статором (обмотки а і b) та ротором
(dr і qr), Рис. 4. При цьому індекс (1) або (2) вказує на належність відповідно
до статора або ротора. Відповідно до такої схематизації визначають нерухому систему
координат статора (a–b) і обертаючу разом із ротором – систему координат ротора
(dr–qr). До обмоток статора прикладаються напруги u1a, u1b,
а до обмоток ротора напруги u2dr, u2qr. Вони створюють відповідні
струми статора i1a, i1b і ротора i2dr, i2qr.
Узагальнена машина вважається двополюсною, тобто pn=1. Багатополюсні
машини приводяться до двополюсної шляхом перерахунку синхронної швидкості поля і
моменту двигуна. Параметри обмоток ротора зводяться до статора. Згідно з визначеннями
на Рис. 4. кут θ, що задовольняє рівнянню руху θ·=ω, є електричним кутом обертання,
що при pn=1 співпадає з механічним кутом обертання.
Узагальнена електрична машина – це спрощена модель реальної машини. Крім названих вище припущень А.1 – А.4, вона ґрунтується на тому, що магнітні потоки і МРС, створювані обмотками статора і ротора, є синусоїдально розподіленими вздовж довжини кола машини. Для обмоток, що мають несинусоїдальну МРС, враховують першу просторову гармоніку поля, магнітні потоки від вищих гармонік відносять до потоків розсіювання.
Напруги живлення обмоток узагальненої електричної машини бувають несиметричними і мають довільну форму. При несиметричному живленні для аналізу динаміки використовують метод симетричних складових і модель Рис. 4. доповнюється ізольованими обмотками нульової послідовності. Кількість обмоток на статорі і роторі може бути довільною, що не змінює узагальненість математичного опису.
Згідно з (2) і (3), а також за умов симетричного живлення, динамічні процеси в електричній частині елементарної узагальненої електричної машини, схема якої зображена на Рис. 4., описуються чотирма рівняннями електричної рівноваги в колах її обмоток і рівнянням електромагнітного моменту двигуна як функції струмів обмоток і механічних координат ω і θ. Для кожної з обмоток рівняння Кірхгофа мають вигляд:
ui = Riii + ddtψi, (11) де i=1a, 1b, 2dr, 2qr; R1a =R1b=R1 – активний опір фази статора; R2dr=R2qr=R2 – зведений активний опір фази ротора; ψi – потокозчеплення відповідної обмотки.
Потокозчеплення кожної обмотки визначається дією струмів усіх чотирьох обмоток машини:
2qr
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.