Указанных недостатков лишены системы автоматического регулирования, построенные на принципе “компенсации возмущений”. В таких системах (рис. 2) регулятор получает информацию о действующих на объект возмущениях и компенсирует их влияние на регулируемый параметр с помощью регулирующего воздействия. Системы с компенсацией возмущений позволяют достичь более высокого качества регулирования, чем системы, использующие принцип отклонения, поскольку регулятор вступает в действие до отклонения регулируемого параметра. Однако такие системы оказываются разомкнутыми, поскольку регулятор не контролирует значение регулируемой величины.
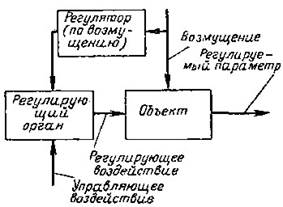
Рис. 2. Разомкнутая система автоматического регулирования по возмущению.
Это может привести к тому, что за счет даже небольшой погрешности в настройке регулятора параметр может постепенно отклониться от заданного значения. Кроме того, в реальных системах практически невозможно обеспечить измерение и компенсацию всех действующих на объект возмущений.
Поэтому наиболее точными являются комбинированные системы автоматического регулирования, использующие одновременно принцип компенсации возмущений и принцип регулирования по отклонению регулируемой величины (рис. 3). При этом сохраняются преимущества обоих принципов регулирования и значительно уменьшаются их недостатки.
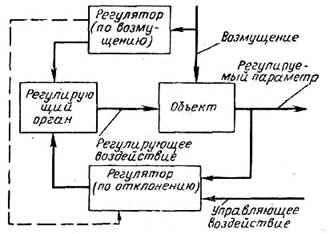
Рис. 3. Комбинированная система автоматического регулирования.
Обеспечение требуемого качества переходных процессов в системах автоматического регулирования достигается за счет выбора закона, по которому регулятор формирует регулирующее воздействие при отклонении регулируемого параметра от заданного значения. При этом в каждом регуляторе имеются органы настройки, позволяющие изменять в известных пределах параметры настройки регулятора, т. е. коэффициенты уравнения, описывающего закон регулирования, по которому работает данный регулятор.
В практике автоматического регулирования применяются главным образом регуляторы, работающие по следующим четырем основным законам регулирования:
1. Закон интегрального регулирования (И - регуляторы). Такие регуляторы формируют регулирующее воздействие на объект, пропорциональное интегралу по времени от отклонения регулируемой величины от заданного значения:
Хр =−Кр∫Δydt ( 1 )
Здесь: Хр — воздействие на регулирующий орган со стороны регулятора;
Кр — коэффициент пропорциональности;
∆y = yз – y — величина рассогласования между значениями заданным y и действительным у регулируемой величины.
2. Закон пропорционального регулирования (П - регуляторы). Основное свойство этих регуляторов заключается в том, что перемещение регулирующего органа у них пропорционально отклонению регулируемой величины от заданного значения:
Хр= -Kр ∆y. ( 2 )
По своим динамическим свойствам пропорциональный регулятор соответствует усилительному звену.
Системы автоматического регулирования с П - регулятором являются статическими, поскольку регулирующее воздействие на объект может быть вызвано только за счет отклонения регулируемого параметра. При этом неравномерность регулирования тем выше, чем меньше коэффициент усиления регулятора δ, равный:
1
δ= ![]() (
3 )
(
3 )
Кр
Пропорциональный закон регулирования в регуляторах непрямого действия достигается обычно с помощью введения в схему регулятора так называемой жесткой обратной связи по положению регулирующего органа или величине регулирующего воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.