Лабораторная работа № 5
Системы автоматического регулирования
Цель работы: 1. Исследование методов регулирования тепловой энергии на горячее водоснабжение и отопление.
2. Приобретение практических навыков в настойке автоматических регуляторов подачи тепловой энергии.
Объект автоматизации вместе с автоматическим регулятором представляет собой систему авто матич е с к о г о р е г у л и р о в а н и я . На рис. 1 представлена принципиальная схема простейшей системы автоматического регулирования, предназначенной для поддержания на заданном значении регулируемой величины, определяющей режим работы объекта.
Величина регулируемого п а р а м е т р а измеряется с помощью чувствительного элемента и сравнивается в регуляторе с з а д а н ны м значением , которое вырабатывается задающим устройством и вводится в систему в виде у п р а в л я ю щ е г о воздействия.
При отклонении регулируемой величины от заданного значения на входе регулятора появляется с и г н а л рассогласования ( ошибка регулирования ) . На выходе регулятора в этом случае вырабатывается сигнал, определяющий регулирующее в о з д е й с т в и е на объект через регулирующий о р г а н и направленный на уменьшение рассогласования. Регулятор будет воздействовать на объект до тех пор, пока регулируемая величина не сравняется с заданным значением, которое может быть постоянным или меняться в зависимости от нагрузки.
Отклонение регулируемой величины от заданного значения может быть вызвано изменением управляющего воздействия или нарушениями режима работы объекта, связанными с различными возмущающими воздействиями . Источники возмущений могут находиться как внутри самого объекта (внутренние возмущения), так и вне его (внешние возмущения, например изменение нагрузки).
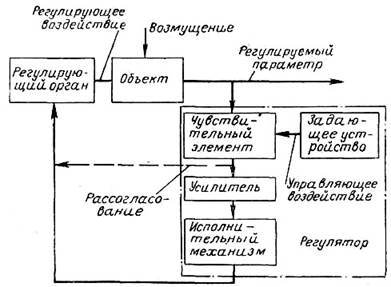
Рис. 1. Структура системы автоматического регулирования.
В том случае, когда чувствительный элемент развивает при отклонении регулируемого параметра усилие или энергию, достаточные для перемещения регулирующего органа, регулятор называется регулятором прямого действия (пунктирная линия на рис. 1).
Обычно сигнал чувствительного элемента регулятора недостаточен по мощности для непосредственного воздействия на объект регулирования. В этом случае применяются регуляторы непрямого действия, имеющие усилитель, получающий энергию извне, для которого чувствительный элемент является командным прибором. На выходе усилителя вырабатывается сигнал, управляющий работой исполнительного механизма ( сервомото ра ) , непосредственно связанного с регулирующим органом объекта.
В зависимости от решаемых задач различают три наиболее распространенных в практике вида систем автоматического регулирования. Системы, в которых управляющее воздействие (заданное значение регулируемого параметра) остается неизменным при всех режимах работы объекта, называются системами стабилизации . Такие системы встречаются наиболее часто. На теплоэнергетических объектах постоянными поддерживаются: давление, температура, расход теплоносителя, уровень и ряд других параметров, характеризующих работу оборудования.
В следящих системах регулируемая величина не остается постоянной, а меняется в зависимости от значений какой-либо другой величины. Такой способ регулирования применяется, например, при автоматизации подачи воздуха в топку котла или печи. Расход воздуха при этом поддерживается пропорциональным расходу топлива. При правильной настройке соотношения между обоими расходами следящая система обеспечивает наиболее экономичные условия сжигания топлива.
В системах программного регулирования заданное значение регулируемого параметра изменяется во времени по заранее заданной программе. Программное регулирование находит применение при автоматизации термических процессов на производстве, при автоматическом управлении пусковыми процессами, а также при автоматизации различных процессов, имеющих циклический характер.
Построение систем автоматического регулирования основывается на применении или комбинировании двух основных принципов регулирования.
Наиболее широкое распространение получил принцип “автоматического регулирования по отклонению” регулируемого параметра от заданного значения ( рис.1). Системы автоматического регулирования, построенные на указанном принципе, представляют собой з ам кну т ы е системы, где реакция чувствительного элемента на отклонение регулируемого параметра вызывает регулирующее воздействие, на объект. Достоинством таких систем является то, что регулируемый параметр находится под непрерывным контролем регулятора. В то же время принцип регулирования по отклонению обладает тем существенным недостатком, что регулятор вступает в действие лишь после появления определенного рассогласования между заданным и действительным значениями регулируемого параметра. Следовательно, в такой системе принципиально невозможно полностью устранить отклонения параметра. С другой стороны, замкнутые системы в определенных условиях способны к самовозбуждению и генерированию колебаний, которые отрицательно сказываются на режиме работы объекта и точности поддержания регулируемого параметра.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.