Рисунок 1.6
 1.7.1.4 Как видно из рисунка 1.6, автономные системы
управления обоими плужками одинаковы, следовательно схемы выполненные на
релейно-контакторной символике также будут идентичны
1.7.1.4 Как видно из рисунка 1.6, автономные системы
управления обоими плужками одинаковы, следовательно схемы выполненные на
релейно-контакторной символике также будут идентичны
Рисунок 1.7
1.7.1.5 Приведем листинг программы основываясь на логических уравнениях автоматного графа
|
Команда |
Переменная |
Комент. |
|
UA |
02.0 |
A01 |
|
UEA |
00.1 |
/X2 |
|
AS |
02.1 |
A11 |
|
UA |
02.2 |
A12 |
|
AL |
02.1 |
/A11 |
|
UA |
02.1 |
A11 |
|
UE |
00.0 |
X1 |
|
AS |
02.2 |
A12 |
|
UA |
02.2 |
A12 |
|
UAN |
02.6 |
/Z1 |
|
AL |
02.2 |
A12 |
|
UA |
02.3 |
A02 |
|
UEA |
00.3 |
/X4 |
|
AS |
02.4 |
A21 |
|
UA |
02.5 |
A22 |
|
AL |
02.4 |
/A21 |
|
UA |
02.4 |
A21 |
|
UE |
00.2 |
X3 |
|
AS |
02.5 |
A22 |
|
UA |
02.5 |
A22 |
|
UAN |
02.7 |
/Z2 |
|
AL |
02.5 |
A22 |
|
UA |
02.1 |
A11 |
|
AS |
02.6 |
Z1 |
|
UA |
02.2 |
A12 |
|
AL |
02.6 |
/Z1 |
|
UA |
02.4 |
A21 |
|
AS |
02.7 |
Z2 |
|
UA |
02.5 |
A22 |
|
AL |
02.7 |
/Z2 |
|
UA |
02.1 |
A11 |
|
UA |
02.1 |
A12 |
|
AB |
02.0 |
A01 |
|
UA |
02.4 |
A21 |
|
UA |
02.5 |
A22 |
|
AB |
02.3 |
A02 |
Задача 2: разработать систему управления совместного заполнения расходных бункеров автоматической формовочной линии, технологическая схема которой приведена на рисунке 2.1. В схеме должен быть предусмотрен переход от совместного управления к автономному (к задаче 1).
2.1 Приведем технологическую схему линии
 |
|||||||
 |
|||||||
 |
|||||||
 |
|||||||
Рисунок 2.1 Технологическая схема для задачи 2
Отличием данной технологической схемы от технологии представленной на рисунке 1.1 в том, что добавлен плужок П12, имеющий посередине щель, через которую он пропускает часть смеси в следующий бункер. Т.о., при отсутствии смеси в обоих бункерах, заполняться будут оба, до тех пор, пока не сработает датчик нижнего уровня во втором бункере (Х4). В схеме управления предусмотрим переключатель Q, позволяющий перейти от автономного регулирования плужками к совместному.
2.2 Составим логические уравнения управления исполнительными механизмами и проведем математические преобразования для их упрощения.

Для привода плужка второго бункера логические уравнения останутся без изменения:

2.3 По полученным логическим уравнениям составим схему управления на релейно-контакторных символах
 |
Рисунок 2.2 Релейно-контакторная схема управления плужками выполняющая требования задачи 2
2.4 По полученным в пункте 2.2 уравнениям сформируем структуру управления в базисе «и», «или», «не»
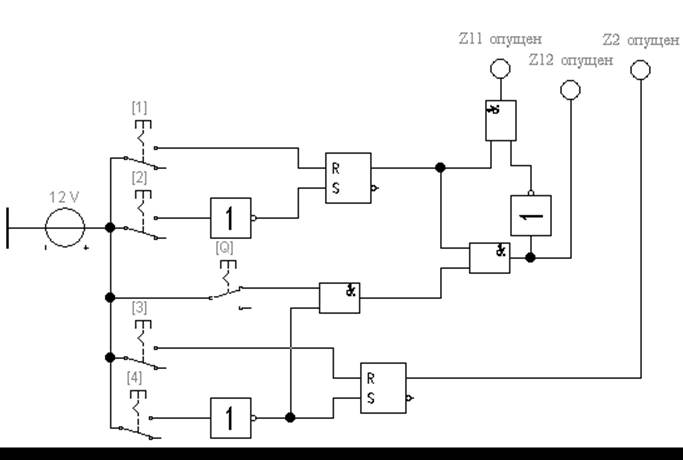
Рисунок 2.3 Структура управления в базисе «и», «или», «не»
2.5 С помощью программы Electronics Workbench Pro смоделируем и проверим работу схемы (рис. 2.3)
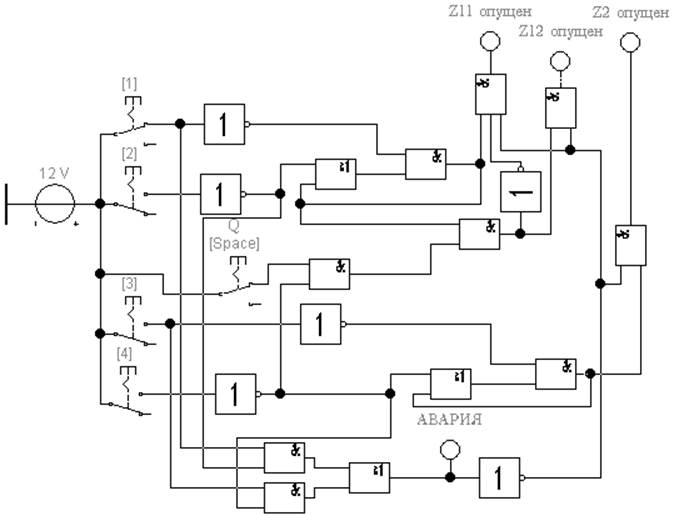
Рисунок 2.4 Структура схемы в Electronics Workbench
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.