






Исследование методов моделирования
транспортных потоков на
 микроуровне и реализация имитатора транспортных
микроуровне и реализация имитатора транспортных
потоков в среде AnyLogic
Магистрантка: Евгения Петрова
Руководитель: Mg.sc.comp. Елена Юршевич
Консультант: Dr.sc.ing. Ирина Яцкив
Актуальность работы
• Существующие исследования моделей поведения водителей основываются на серьезных допущениях:
– Модели исследуются в однополосных потоках
– Не учитываются внешние помехи (перестроения, другие участники движения, погодные условия и т.д.)
• Такого рода исследования затруднительно проводить на натурных экспериментах и требуют специализированного программного продукта
Реализовать имитатор транспортных потоков, позволяющий проводить исследования моделей транспортных потоков в условиях, приближенных к реальным и провести сравнительный анализ некоторых моделей поведения участников движения
 I. Анализ
существующих моделей следования
I. Анализ
существующих моделей следования
– Сделать обзор существующих подходов в моделировании ТС и трафика
– Выделить и провести классификацию подходов в моделировании поведения транспортных средств
– Провести сравнительный анализ моделей следования на полосе движения
– Выделить достоинства и недостатки рассмотренных моделей
– Определить ряд допущений, при которых проводились исследования моделей
 II. Реализовать
программный продукт «Имитатор транспортных потоков»
II. Реализовать
программный продукт «Имитатор транспортных потоков»
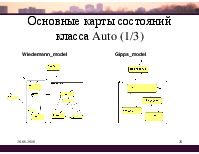
– Изучить психо-физические модели следования
Видеманна и Гипса
– Изучить модель смены полосы Гиппса – Программно реализовать:
• Среду, позволяющую строить транспортную сеть любой конфигурации
• Модели поведения водителя (модели следования)
• Модели смены полосы
 II. Реализовать
программный продукт
II. Реализовать
программный продукт
«Имитатор транспортных потоков»
Имитатор должен поддерживать:
• Модели принятия решения на перекрестках
• Возможность сбора статистики, характеризующей потоки транспортных средств
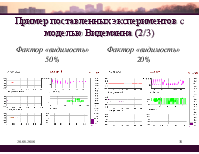
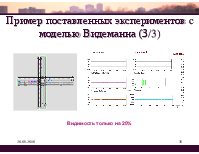
• Возможность учета погодных условий
• Интерфейс, позволяющий ставить эксперименты с моделями
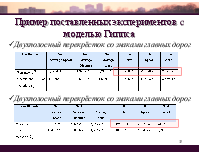
– Провести демонстрационные эксперименты
• Модели микроуровня (microscopic models)
• Модели мезоуровня (mesoscopic models)
• Модели макроуровня (macroscopic models)
• Субмикроскопические модели
(submicroscopic simulation models)
• Gazis-Herman-Rothery (GHR)
• Collision Avoidance model (CA)
– Модели Kametani и Sasaki, Гиппс, Лѐйцбаха, Крауса
• Psychophysical or Action Point model (AP)
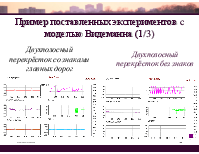
– Модель Видеманна
• Linear model
– Модели Helly, Hanken и Rockwell, Burnham и Seo, Aron Xing
• Fuzzy logic-based model
– Модели Rekersbring , Henn, McDonald и Wu
• Способ представления транспортной сети (TC);
• Перечень характеристик транспортного средства (ТС), которые учитываются в модели;
• Характеристики потока и дороги, которые могут учитываться при моделировании;
• Характеристики поведения водителя.
üüПо способу представления ТСПо набору характеристик транспортных средствüПо набору характеристик потока ü По набору характеристик водителя дороги
• Модели семейства car-following ориентируются на характеристики индивидуального транспортного средства;
• Модель Видеманна класса PSM выигрывает по количеству учитываемых факторов в моделировании транспортного трафика на микроуровне;
• Модель Видеманна включает в себя характеристики водителя, самого транспортного средства и представляет «золотую середину» между клеточными автоматами и остальными классами моделей семейства car-following;
• Модель Видеманна включает достаточное большое количество параметров, нуждающихся в калибровки, что усложняет ее адекватное использование на практике;
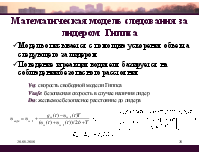
• Модель следования за лидером Гиппса более проста в использовании, но и менее точна в отображении свойств потока;
• Остальные модели более примитивны в описании транспортных потоков.
 |
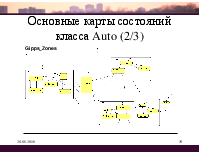
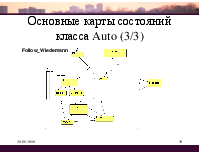
• Поддерживаемые модели:
üМодель следования за лидером Видемана
üМодель следования за лидером Гиппса
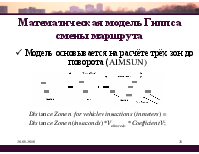
üМодель смены полосы Гиппса
• Функциональные требования:
üВозможность построения сложных транспортных сетей
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.