üВозможность исследования моделей относительно дополнительных характеристик
üВозможность исследования моделей при наличии других объектов в транспортной сети
üСбор статистики для исследования и проведения сравнительного анализа моделей
(1/2)
ü Модель описывается с помощью ускорения объекта следующего за лидером
 Bmax: Максимальное
ускорение для небольших ТС в режиме свободного вождения
Bmax: Максимальное
ускорение для небольших ТС в режиме свободного вождения
 B(I):
Кинематический
расчѐт торможения для подвижного ТС процесс приближения
B(I):
Кинематический
расчѐт торможения для подвижного ТС процесс приближения
(2/2)
ü Поведение и реакция водителя определяется порогами и расстоянием до лидера
 SDV:
Порог осознания разницы скорости на большом расстоянии SDX: Порог
осознания, что расстояние увеличивается
SDV:
Порог осознания разницы скорости на большом расстоянии SDX: Порог
осознания, что расстояние увеличивается
CLDV: Порог осознания маленькой разницы в скорости на малом расстоянии
OPDV: Порог осознания маленькой разницы в скоростях на малом уменьшающемся расстоянии
AX: Желаемое расстояние для неподвижного транспортного средства
 |
üПоведение и реакция водителя базируется на соблюдении безопасного расстояния
 Vα:
скорость свободной модели Гиппса
Vα:
скорость свободной модели Гиппса
Vsafe: безопасная скорость в случае наличия лидер
Dα: желаемое безопасное расстояние до лидера
ü Модель основывается на расчѐте трѐх зон до поворота (AIMSUN)
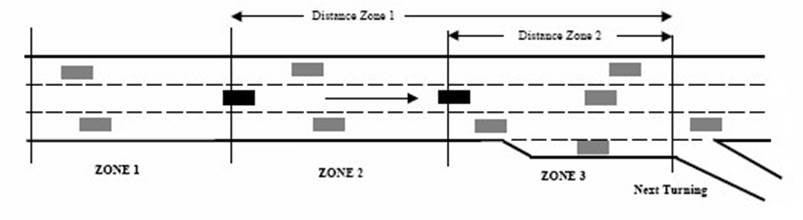
DistanceZonen forvehiclevinsection s(inmeters)
DistanceZonen(inseconds)*Vallowed,v *CoefficientV;
• Позволяет задавать транспортную сеть разной конфигурации
• Определяет расположение дорожных знаков
• Использует все поддерживаемые распределения в пакете для генерации потока
• Поддерживает математические модели следования за лидером Видеманна и Гиппса
Реализованные возможности имитатора транспортных потоков (2/3)
• Позволяет задавать параметры для 3-х видов автомобилей: легковые, средние и грузовые
• Позволяет задавать процентное отношение видов автомобилей в сети
• Позволяет описывать маршруты
• Позволяет управлять параметрами встроенных моделей в процессе симуляции
• Позволяет настроить сбор статистики и отображает еѐ в процессе работы модели
• Поддерживает модель смены полосы Гиппса
• Поддерживает расчѐт зон Гиппса относительно активного объекта
• Позволяет исследовать модели на изменение внешних факторов
ü Алгоритм смены полосы
ü Алгоритм выбора маршрута
ü Алгоритм движения по перекрѐстку без знаков
ü Алгоритм движения по перекрѐстку со знаками главных дорог
ü Алгоритм съезда со второстепенной полосы
ü Алгоритм съезда на второстепенную полосы
ü Алгоритм выезда на главную дорогу
ü Алгоритм взаимодействия с окружающими объектами
• Auto: поведение водителя
• NavigatSystem: информация об объектах
• RoadSystem: информация о транспортной сети
• Road: транспортная сеть
•
 Routes, ChangeRoute, SecondR, MainR:
классы для задания возможных маршрутов
Routes, ChangeRoute, SecondR, MainR:
классы для задания возможных маршрутов
• Stat, StatDB, StatPoint: классы сбора статистики
• Traffic_Generator: классы для генерации потока
• Zoom: класс задания масштаба
• Network: класс основных параметров модели
cd Class Model
 Диаграмма реализованныStat х классов cd Class Model
Диаграмма реализованныStat х классов cd Class ModelMainR+ EndPoint: Stat_Point
cd Class Model
CarData
+ xs: double
+ ys: double +
AutoData + xe: double +
+ ye: double + + xs: double SecondR+ ts: Auto +
++ ys: doublexe: double + road: Road++ v: doublesize: double ++
+ left: Road + ye: double
+ right: Road + a: Auto
+ Network: Network + r: Road
+ X: double
+ in: integer
+ start_point: double + v: double
+ Y: double
+ size: double
+ RS: RoadSystem
+ saveInDB() : void
+ returnRoute() : route Anylogic:Message
Stat_Info Class
+ A_av: double
+ V_av: double
+ D_av: double
crossroad_routes
+ route: Road
+ direct: String
RoadData
+ RPointer: Road
+ RName: String
+ road: Road+ StartPoint: Stat_Point + SourceRoad: Road+ Timeout: double
+ Network: Network
+ Main: boolean+ Network: Networkroutesblocks CrossObject
+ start_point: int+ StatDB:
Stat_DB route+ RS:
RoadSystem+ Point1: Point+ roudb: Vector + road1_name: string
+ sroad: Road + Network: Network
left: Road+ saveInDB() : void+ Point2: Point+ x: double + road2_name: string
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.