obj: Object+ returnRoute() : route+ AutoC: Vector+ y: double + X: double right: Road + StatInfo: Stat_Info+ obj: Object + Y: double
main: Road + Accel: Dataset + road1_index: int
X: doubleY: double + NS: NavigatSystem++ road2_index: intRS: RoadSystem
+ Average_Accelaration: Dataset Sign
+ Average_Distance: Dataset+ getX() : doubleGeneral
+ X: double + Average_Speed: Dataset+ getY() : double
+ start_point: int+ + Dist: Datasetlength(double, double, double, double) : double+ getIndex1() : int
+ Y: double + + animation: Animationradians(double) : double+ getIndex2() : int
+ degree(double) : double
+ getSX() : double+ getRotation(double, double, double, double) : double
+ getDirection(double, double, double, double) : String
+ getPoint(Road, int, Road, double, double, double, RoadSystem) : Point
+ getDistance(Road, int,
double, double, int, double, double) : double
+ contains(double, double, double, double, double, double) : boolean
+ getIntNumber(int) : int Stat_DB
+ getPerpendBetweenRoads(double, double, Road, Road, RoadSystem) : double
+ getYbyX(double, double, double, double) : double+ SourceRoad: Road+ Timeout: double
Routes + write(String) : voidStat_Point+ Network: Network+ DB: Vector + road: Road + X: double++ start_point: introad1_left: Road+ Average_Dist: Dataset
General::Point
++ rname_left: Stringrname_right: String ++ Y: doublepoint: Animation++ road2_left: Roadroad1_right: Road++ Average_V: DatasetAverage_Accel: Dataset
+++ Network: NetworkX: doublestart_point: int++ X: doubleY: double ++ RS: RoadSystem...: + add(Stat_Info) : void
+ Y: double
+ RS: RoadSystem + saveindb(Road, String) : void
+ saveRoutes() : void
+ saveInDB() : void + saveInGlobalDB() : void
+ returnRoute() : route + getRoute(int) : crossroad_routes
+ getSize() : int
 |
 |
||
Wiedemann_model Gipps_model
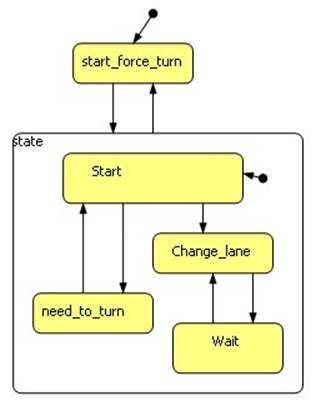
Основные карты состояний класса Auto (2/3)
Основные карты состояний класса Auto (3/3)
Оценка сложности программной реализации имитатора
![]() Виды
экспериментов
Виды
экспериментов
![]() üПерекрѐсток
без знаков
üПерекрѐсток
без знаков
üПерекрѐсток со знаками главных дорог
üВъездная дорога
üСъездная дорога
üДвуполосная сеть
üИзменение внешних факторов
Двухполосный
Двухполосный
перекрѐсток со знаками перекрѐсток без знаков
главных дорог
Фактор «видимость» Фактор «видимость»
50% 20%
![]() Пример поставленных экспериментов c моделью Гиппса
Пример поставленных экспериментов c моделью Гиппса
üДвухполосный перекрѐсток со знаками главных дорог
üДвухполосный перекрѐсток со знаками главных дорог
•
![]() Эксперименты
доказали, что поведение моделей Видеманна и Гиппса зависят от Есть необходимость в изучении моделей структуры
сети, включая возможность смены полосы:
Эксперименты
доказали, что поведение моделей Видеманна и Гиппса зависят от Есть необходимость в изучении моделей структуры
сети, включая возможность смены полосы:
- Обе модели зависят от поведения водителя в определѐнных транспортных сетяхследования за лидером
- Обе модели зависят от частоты генерации транспортного потока
- Выявлено слабое место в модели Гиппсав условиях более приближённых к
- Обе модели чувствительны к значению параметра «безопасное расстояние». В случае
- модели Гиппса имитатор констатирует «ошибочные» ситуацииОбе модели чувствительны к маневрированию водителейреальным
• Модель Гиппса слабо чувствительна к таким внешним факторам, как видимость и коэффициент трения-скольжения дороги
• Модель Видемана очень чувствительна, как к ухудшению видимости, так и увеличению скольжения на полосе. Количество аварийных ситуаций резко возрастаетПрименение разработанного имитатора
необходимо
• Сделан обзор существующих подходов в моделировании трафика на микро-уровне и выявлены недостатки существующих исследований этих моделей
• Реализован имитатор, позволяющий проводить исследования транспортных потоков в условиях, приближенных к реальным на моделях Видеманна и Гипса
• Проведены эксперименты с моделями в реализованном имитаторе потока
• На основе экспериментов сделаны выводы о том, что есть необходимость в изучении моделей Видеманна и Гиппса в условиях, приближѐнных к реальным
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.