Для того чтобы система была устойчива и соответствовала ТЗ, нужно выполнить следующие условия:
- ЛАХ системы должна лежать выше контрольной точки L(ωк) - в этом случае ошибка воспроизведения эквивалентного гармонического сигнала не будет превышать заданную ошибку по ТЗ;
- ЛАХ должна пересечь уровень 0дБ с наклоном -20дБ/дек раньше, чем ЛФХ достигнет значения -1800 – в этом случае система будет устойчива;
- протяженность участка -20дБ/дек должна быть не
меньше, чем  - в этом
случае мы получаем заданный по ТЗ коэффициент колебательности системы.
- в этом
случае мы получаем заданный по ТЗ коэффициент колебательности системы.
Для того чтобы выйти из запретной зоны, достаточно
поднять ЛАХ на 7дБ, для этого введем дополнительный коэффициент усиления 1.75. Так
как система является астатической первого порядка, то первоначальный наклон ЛАХ
составляет -20дБ/дек. В точке, соответствующей частоте 7.1рад/с, происходит
изменение наклона ЛАХ до -60дБ/дек. Для прохода уровня 0дБ с наклоном ‑20дБ/дек
на частоте 10рад/с изменим наклон ЛАХ на +20дБ/дек, на частоте 25рад/с еще на
+20дБ/дек, затем после прохода уровня 0дБ – изменим наклон на ‑40дБ/дек на
частоте 500рад/с. Данные частоты выбраны из необходимости получения нужного
коэффициента колебательности М (![]() ,
длина участка
,
длина участка  ). Желаемая,
располагаемая ЛАХ, ЛАХ корректирующего звена, а также запретная область
приведены на рис. 18. Желаемая ЛФХ – на рис. 19.
). Желаемая,
располагаемая ЛАХ, ЛАХ корректирующего звена, а также запретная область
приведены на рис. 18. Желаемая ЛФХ – на рис. 19.
Рис. 18 Желаемая (1) и располагаемая (2) ЛАХ, запретная область (3), ЛАХ корректирующего звена (4)
После построения скорректированных характеристик, был проведен анализ системы на устойчивость. Для этого в подпрограмму Simulink была введена структурная схема, приведенная на рис. 20. График переходного процесса, приведенный на рис. 21, показывает, что данная система устойчива и удовлетворяет ТЗ.
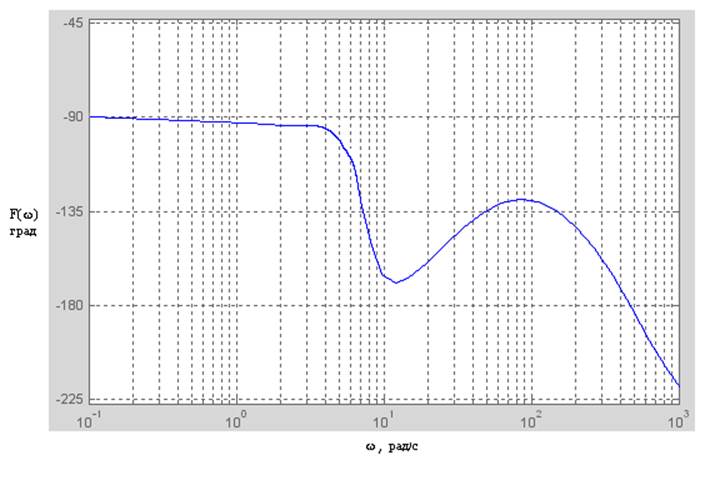
Рис. 19 Желаемая ЛФХ
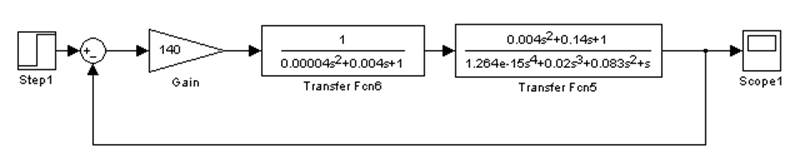
Рис. 20 Структурная схема скорректированной системы
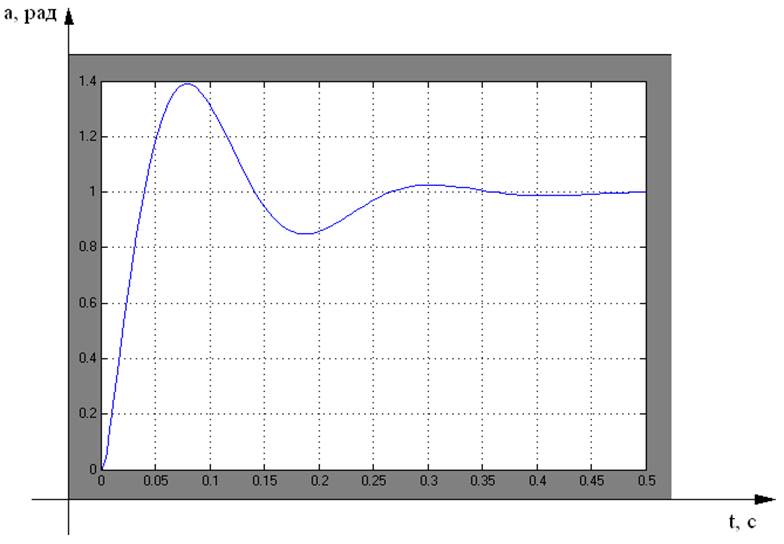
Рис. 21 График переходного процесса скорректированной системы
Выведем сначала передаточную функцию корректирующей системы, для чего поделим передаточную функцию желаемой системы на передаточную функцию располагаемой системы.
Надо указать, что в нашу систему входит также корень X2, который даст излом располагаемой ЛАХ на -80 дБ/дек. Но произойдет это на высокой частоте, на 14 декаде, поэтому в наших расчетах и при построении желаемой ЛАХ и ЛАХ коррекции этот корень учитываться не будет.

Для реализации данной передаточной функции необходима следующая схема (рис. 22):
Рис. 22 Схема корректирующего звена
Данная схема реализует следующую передаточную функцию:

Данную передаточную функцию можно реализовать на двух операционных усилителях. Если функцию разбить на две части, то должно выполняться следующее условие: постоянная времени числителя должна быть больше постоянной времени знаменателя (т.е. Т1>T3, T2>T4). Для нахождения параметров электрической цепи нужно решить систему уравнений:
 ;
;
 ;
;
T1=(R1+R2)·C1; T2=(R4+R5)·C2;
T3=R2·C1; T4=R5·C2.
Исходя из полученной ранее ЛАХ корректирующего звена – определим КК(0), КК(∞) и постоянные времени:
 ;
;
 ;
;
T1=0.1c; T2=0.04c;
T3=0.002c; T4=0.002c.
После подбора параметров были получены следующие значения:
R1=490 кОм, R2=10 кОм, R3=857.5 кОм, R4=190 кОм, R5=10 кОм, R6=190 кОм, C1=200 нФ, C2=200 нФ.
Проверка:
 ;
;
 .
.
Таким образом, построение ЛАХ корректирующего звена выполнено с необходимой степенью точности. При суммировании ЛАХ каждого из элементарных звеньев была получена наша ЛАХ коррекции.
8. Заключение.
В данном курсовом проекте, исходя из требований технического задания, была выполнена работа:
- по анализу нагрузки;
- выбран исполнительный двигатель;
- построена механическая характеристика электродвигателя;
- рассчитано оптимальное передаточное отношения редуктора;
- рассчитаны основные параметры редуктора;
- сконструирован редуктор;
- выбран измеритель рассогласования;
- проведен динамический анализ системы;
- рассчитано звено коррекции;
- построена принципиальная электрическая схема.
В приложении 1 приведен сборочный чертеж редуктора, в приложении 2 – схема компоновочная.
Разработанная система удовлетворяет всем требованиям, предъявленным в техническом задании.
Список используемой литературы:
1. Герман В.Г., Земляков Н.Д., Сусленникова Е.Ю. Автоматизированные приводы летательных аппаратов. Выбор электродвигателя. Учебное пособие. Л.: 1991 г.
2. Гусев С.А., Шишлаков В.Ф. Синтез систем автоматического управления. Методические указания по курсовому проектированию. СПбГУАП. СПб., 2000 г.
3. Шишлаков В.Ф. Проектирование электронных усилительных устройств автоматического управления. Учебное пособие. СПбГУАП. СПб., 2005 г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.