Для того чтобы выбранные ПИП и собранный на их основе измеритель рассогласования удовлетворял заданной по ТЗ точности, нужно выполнить следующее условие:
![]() ,
где
,
где  , χСТАТ и
χСКОР – из ТЗ.
, χСТАТ и
χСКОР – из ТЗ.
Потенциометр выберем из следующих условий:
- мощность рассеивания потенциометра должна быть больше мощности, которая будет выделяться на нем при напряжении питания 27 В;
- угол активной зоны потенциометра должен быть больше максимального угла поворота нагрузки;
- выбранный потенциометр должен удовлетворять условиям точности.
Выберем для начала потенциометр ПЛП-11 со следующими параметрами:
|
Тип |
ε, % |
jр, рад |
МТР·10-2, Н·м |
R, Ом |
Рр, Вт |
м, кг |
|
ПЛП-11 |
±0,3 |
5,76 |
0,705 |
500÷1000 |
2 |
0,048 |
Мощность, рассеиваемая на потенциометре:
 ,
что укладывается в допустимые пределы.
,
что укладывается в допустимые пределы.
Угол активной зоны потенциометра намного больше требуемого; теперь проведем расчет точности.
 ,
что соответствует 8´15´´,
,
что соответствует 8´15´´,
![]() ,
что соответствует 11´41´´,
,
что соответствует 11´41´´,
 .
.
Ошибка измерителя рассогласования меньше допустимой ошибки, определенной по техническому заданию, следовательно, выбранный потенциометр подходит.
Можно провести расчет допустимой ошибки с учетом того, что нагрузкой является антенная установка:
 ,
что соответствует 7054¢.
,
что соответствует 7054¢.
Данная допустимая погрешность измерителя рассогласования получена из более мягких критериев, следовательно, потенциометр подойдет в любом случае.
На рис. 9 - принципиальная схема ИР, построенного по компенсационной схеме, на рис. 10 – внешний вид потенциометра ПЛП-11.
Рис. 9 Принципиальная схема ИР, построенного по компенсационной схеме
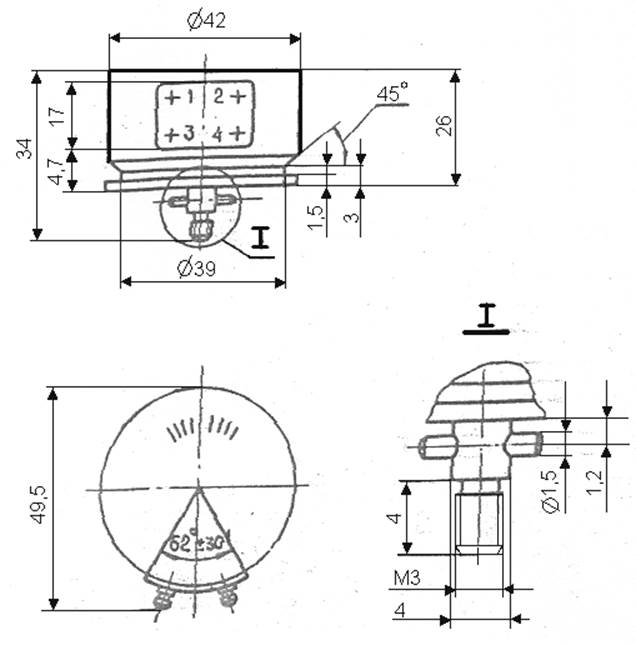
Рис. 10 Внешний вид потенциометра ПЛП-11
7. Динамический расчет.
Для расчета системы на динамическую устойчивость нужно построить функциональную схему привода со всеми входящими в него параметрами. На рис. 11 приведена структурная схема привода антенны.
Рис. 11 Структурная схема привода антенны
Проведем расчет параметров, входящих в схему:


где СУ – коэффициент упругого скручивания (от 100 до 1000 Н·м/рад).
Если данную схему упростить, то получится другая структурная схема, приведенная на рис. 12.
Рис. 12 Упрощенная структурная схема привода антенны




Для построения переходного процесса в программе MATLAB, подпрограмме Simulink, нужно построить схему, приведенную на рис. 13.
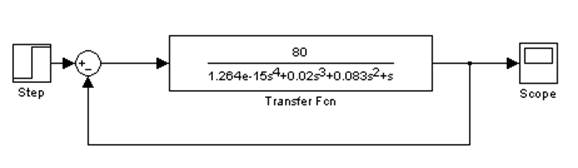
Рис. 13 Структурная схема в подпрограмме Simulink
Рассмотрим систему в малых отклонениях, которые можно считать линейными. Данная структура представляет собой математическую модель антенной установки. На входе системы – ступенчатая функция, которая представляет собой эквивалент поступления на вход сигнала управления на поворот на один радиан.
На рис. 14 и 15 приведены графики переходного процесса, представляющий собой резкое нарастание выходного сигнала.
Вывод: данная система неустойчива, для нормальной работы необходимо добавить корректирующее звено.
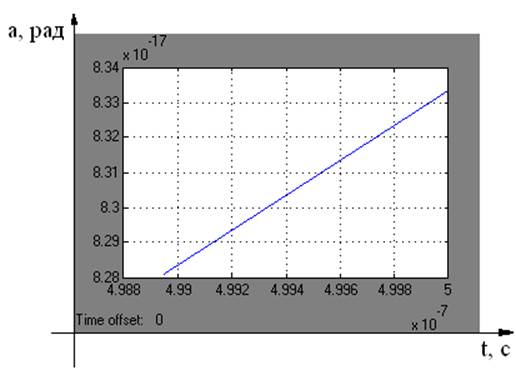
Рис. 14 График переходного процесса (влияние составляющей а3 – быстрое нарастание сигнала в начальный момент времени)
К тому моменту, когда на переходный процесс начнут оказывать влияние коэффициенты а2 и а1 – процесс, обусловленный составляющей а3, затухнет, и график будет иметь вид как на рис. 15.
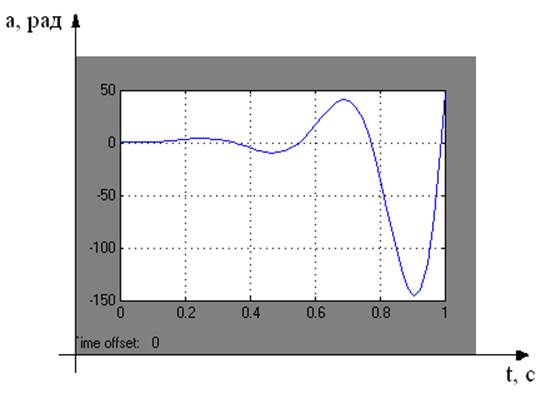
Рис. 15 График переходного процесса
Для построения корректирующего звена нужно представить передаточную функцию исходного звена в другом виде, при котором в знаменателе стоят элементарные сомножители.

После решения знаменателя относительно p были найдены корни:
X1=0;
X2=-15822784810122.432278;
X3=-2.075+i·6.76;
X4=-2.075-i·6.76.
Теперь передаточную функцию можно записать в более удобном виде:
 ,
где:
,
где:
Т1=6.32·10-14, Т2=0.141 с, ξ=0.294.
На рис. 16 построена логарифмическая амплитудная характеристика нескорректированной системы, на рис. 17 – логарифмическая фазовая характеристика.
Найдем параметры ωк и Ак, которые позволят сформировать требования к низкочастотной части желаемой характеристики: чтобы ошибка воспроизведения гармонического сигнала не превышала заданную по техническому заданию, ЛАХ системы должна проходить выше минимум на 3дБ контрольной точки с координатами ω=ωк, L(ω)=20lg(Ak/xmax).
 ,
,
 ,
,
 .
.
Рис. 16 ЛАХ нескорректированной передаточной функции
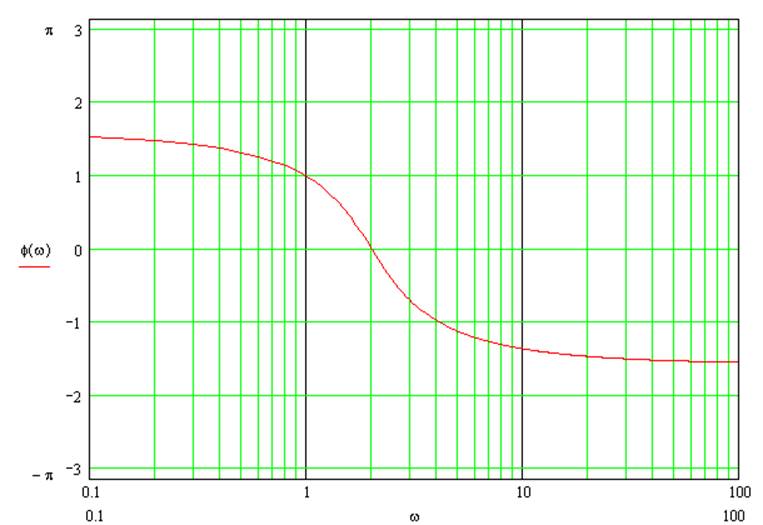
Рис. 17 ЛФХ нескорректированной передаточной функции
Как видно из графика, данная ЛАХ заходит в запретную зону, ограниченную точкой L(ωк). Кроме того, пересечение оси абсцисс идет под наклоном -60дБ/дек и происходит это позже, чем график ЛФХ достигает значения -1800.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.