Взяв первую производную по i от
уравнения  и приравняв ее 0
получаем экстремум в точке i0=1869. Эта точка лежит много правее, чем передаточное отношение i=750,
которое было сосчитано ранее. Выбираем окончательно передаточное отношение i=750,
так как если мы выберем передаточное значение 1869, то наша система не
отработает максимальную скорость вращения нагрузки, которая указана в
техническом задании на проектирование. На рис. 4 график функции εm(i).
и приравняв ее 0
получаем экстремум в точке i0=1869. Эта точка лежит много правее, чем передаточное отношение i=750,
которое было сосчитано ранее. Выбираем окончательно передаточное отношение i=750,
так как если мы выберем передаточное значение 1869, то наша система не
отработает максимальную скорость вращения нагрузки, которая указана в
техническом задании на проектирование. На рис. 4 график функции εm(i).
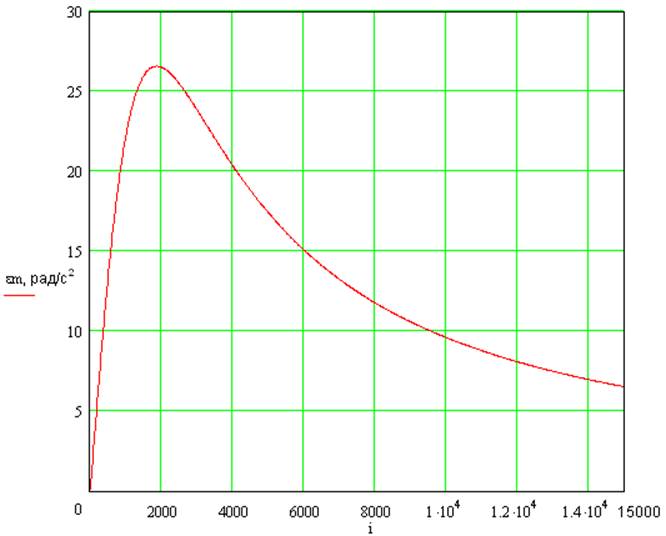
Рис. 4 Зависимость εm(i)
4. Расчет основных параметров редуктора.
Проведем расчет числа пар зубчатых колес:
 ,
возьмем число пар 5.
,
возьмем число пар 5.
Разобьем передаточное отношение редуктора на ряд передаточных отношений пар зубчатых колес по формуле:
Выберем число зубцов каждого зубчатого колеса:
1 пара Z1=35, Z2=70
2 пара Z3=30, Z4=90
3 пара Z5=21, Z6=105
4 пара Z7=21, Z8=105
5 пара Z9=21, Z10=105.
Выберем модуль зубчатых колес по формуле, где кb=0,4…0,6 – коэффициент ширины зуба, σ=780·107Н/м2 – допустимое напряжение в стали зубчатых колес при расчете на выносливость:

Ближайшее гостированное значение модуля 0,5мм. Проведем расчет диаметров зубчатых колес:
![]()
d1=17,5мм, d2=35мм,
d3=15мм, d4=45мм,
d5=10,5мм, d6=52,5мм,
d7=10,5мм, d8=52,5мм,
d9=10,5мм, d10=52,5мм
Вычислим толщину каждого зубчатого колеса, где ψ=4…10:
![]()
Вычислим теперь момент инерции редуктора, где ρ=7850 кг/м3 – плотность конструкционной стали Ст45:
Вернемся к началу расчета и подставим вместо 0 полученное значение момента инерции редуктора:

Новые значения результирующего и эквивалентного моментов укладываются в пределы допустимых значений для выбранного двигателя. На рис. 5 приведена кинематическая схема редуктора.
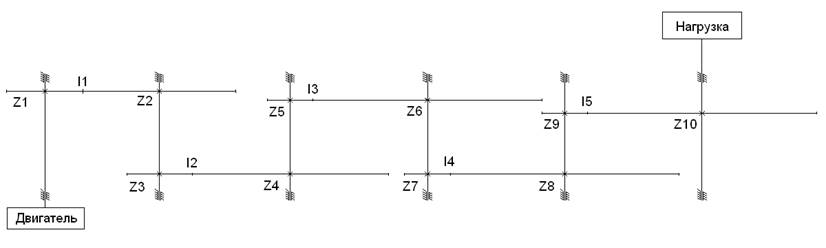
Рис. 5 Кинематическая схема редуктора
5. Построение механической характеристики электродвигателя.
Для построения механической характеристики двигателя постоянного тока и правильной линеаризации нужно определить, к какому классу по мощности относится данный двигатель. Для этого зададимся условием, что двигатели с пусковым током более 20А относятся к двигателям большой мощности.
![]()
Так как двигатель можно считать двигателем малой мощности, то допускается линеаризация механической характеристики двумя прямыми. Для этого на оси Х отложим точку пускового момента, затем точку номинального момента и номинальной скорости; продлим ее до пересечения с осью У. На оси У отложим точку αΩ·ΩN, где αΩ=1,1÷1,3 – коэффициент запаса. Соединим эту точку с полученной ранее прямой параллельно оси Х. Уравнение прямой при Ω≤ αΩ·ΩN:
 ,
где
,
где 
Далее на графике отложим точку, соответствующую максимальному моменту нагрузки двигателя и максимальной скорости вращения. Эта точка находится на пересечении частоты вращения 600 рад/с и момента на валу двигателя 0,03 Н/м. Точка находится внутри области графика, следовательно, в любой момент времени двигатель сможет отработать нагрузку.
На рис. 6 – механическая характеристика двигателя МИГ-40ДТ, на рис. 7 – механическая характеристика и отложенная на ней точка максимального момента и максимальной скорости нагрузки.
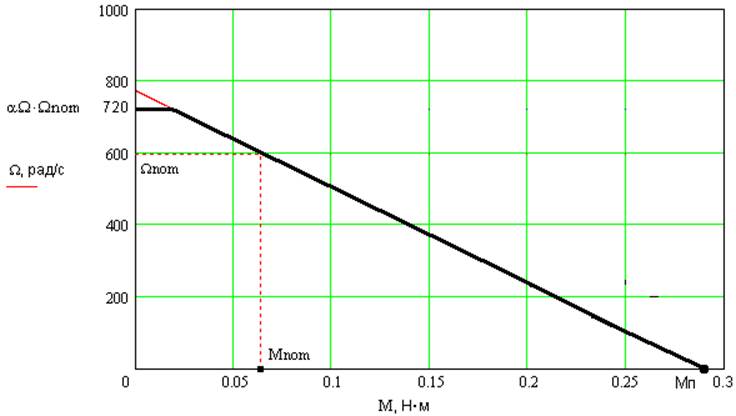
Рис. 6 Механическая характеристика
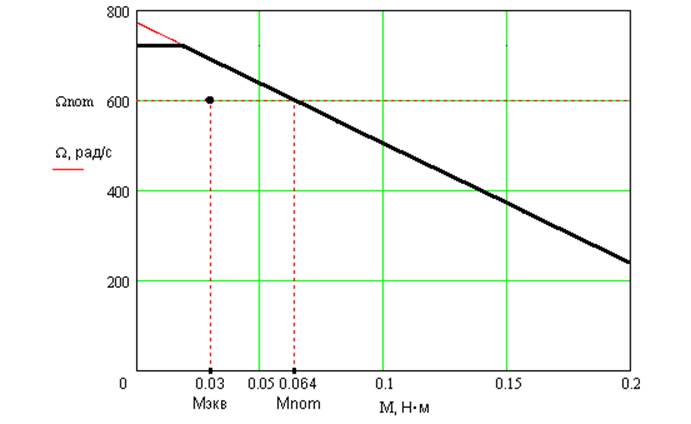
Рис. 7 Механическая характеристика и точка максимума нагрузки
6. Выбор измерителя рассогласования.
Измерители рассогласования необходимы в любой системе, в которой необходимо отслеживать угол поворота исполнительного элемента, скорость вращения нагрузки и т.д., преобразуя конкретную неэлектрическую величину в электрический сигнал. Любой измеритель рассогласования строится на основе первичных измерительных преобразователей (ПИП), соединенных по каскадной или компенсационной схеме. В качестве ПИП применяются потенциометры, сельсины и вращающиеся трансформаторы, если требуется отследить отработку угла поворота и тахогенераторы, если нужно отследить отработку по скорости. Так как разрабатываемая система постоянного тока, требующая отработки по углу поворота, то в качестве ПИП выбираем потенциометры, соединенные по компенсационной схеме. На рис. 8 приведена структурная схема:
Рис. 8 ИР на потенциометрах, построенный по компенсационной схеме
![]()
Для построения измерителя рассогласования берут одинаковые потенциометры с одинаковым сопротивлением. Тогда коэффициент измерителя рассогласования вычисляется по формуле:
 ,
где UИП
– напряжение питания ПИП (желательно как у двигателя), φН – угол
активной зоны потенциометра.
,
где UИП
– напряжение питания ПИП (желательно как у двигателя), φН – угол
активной зоны потенциометра.
Ошибка измерителя рассогласования определяется по формуле:
![]() ,
где χД – ошибка датчика, χП – ошибка приемника.
,
где χД – ошибка датчика, χП – ошибка приемника.
Так как потенциометры одинаковые, то:
 ,
где ε – допустимое отклонение выходного напряжения от линейной зависимости в
процентах, αм – максимальный угол поворота нагрузки из технического
задания.
,
где ε – допустимое отклонение выходного напряжения от линейной зависимости в
процентах, αм – максимальный угол поворота нагрузки из технического
задания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.