![]() -
наибольшая угловая скорость, с-1.
-
наибольшая угловая скорость, с-1.
 с-1.
с-1.
Амплитуда ![]() определяется
по формуле:
определяется
по формуле:
 ,
с-1
,
с-1
Xmax – допустимая ошибка:
![]()
Так как рабочий орган в приводе находится под воздействием статического момента Мст, то ордината контрольной точки определяется по выражению:
 ,
,
Получим:
![]() .
.
Точка пересечения правой границы запретной зоны с осью называется
базовой частотой ![]() и,
с учетом статического момента, определяется по выражению:
и,
с учетом статического момента, определяется по выражению:
Для построения среднечастотной области желаемой ЛАХ, найдем ее длину:
Для того чтобы система была устойчива и соответствовала ТЗ, нужно выполнить следующие условия:
- ЛАХ системы должна лежать выше контрольной точки L(ωк) - в этом случае ошибка воспроизведения эквивалентного гармонического сигнала не будет превышать заданную ошибку по ТЗ;
- ЛАХ должна пересечь уровень 0дБ с наклоном -20дБ/дек раньше, чем ЛФХ достигнет значения -1800 – в этом случае система будет устойчива;
-
протяженность участка -20дБ/дек должна быть не меньше, чем  -
в этом случае мы получаем заданный по ТЗ коэффициент колебательности системы.
-
в этом случае мы получаем заданный по ТЗ коэффициент колебательности системы.
С учетом того, что хотелось бы получить более простое звено коррекции, мы повторяем располагаемую ЛАХ в низко частотной области, так как она не заходит в запретную область. Таким образом при вычитании желаемой и располагаемой ЛАХ получается 0, следовательно нам не нужен усилительное звено в цепи коррекции. Для того чтобы построить среднечастотную область желаемой ЛАХ, необходимо изменить ее наклон на -20 Дб/дек, и выдержать протяженность среднечастотной области. В высокочастотной области повторяем наклон располагаемой ЛАХ, для этого ломаем желаемую ЛАХ с наклона -20 Дб/дек на -60 Дб/дек (см рис.11).
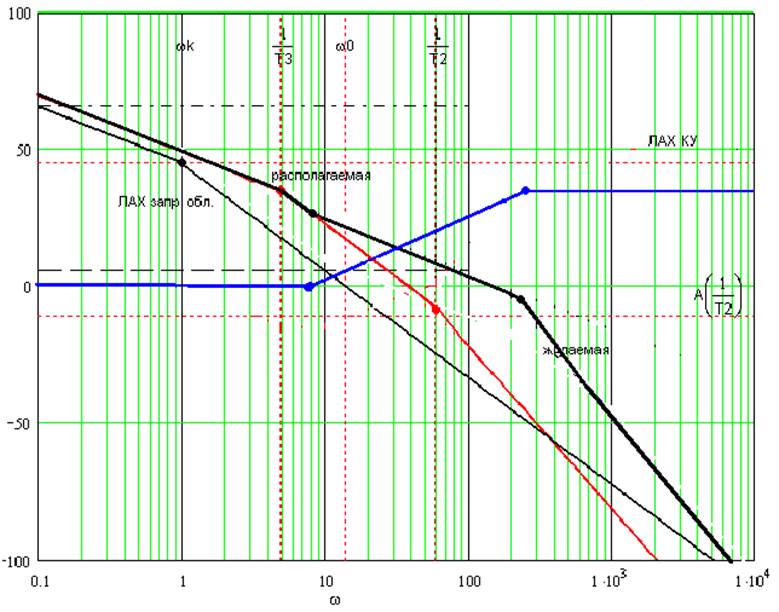
Рис. 11 Рас
полагаемая, Желаемая и ЛАХ корректирующего устройства.
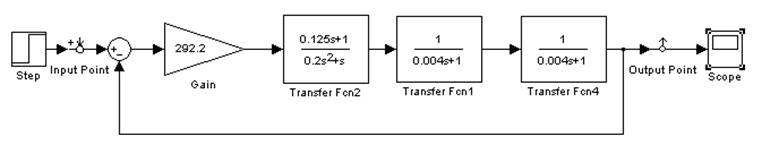
Рис.12 Передаточная функция скорректированной системы.
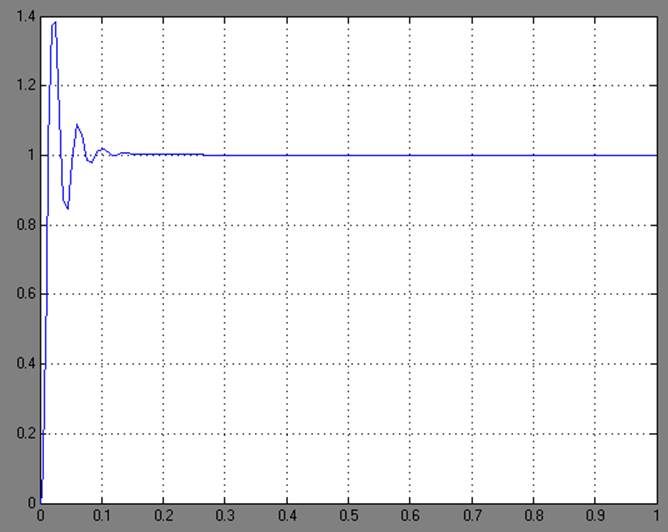
Рис. 13 Переходный процесс скорректированной системы.
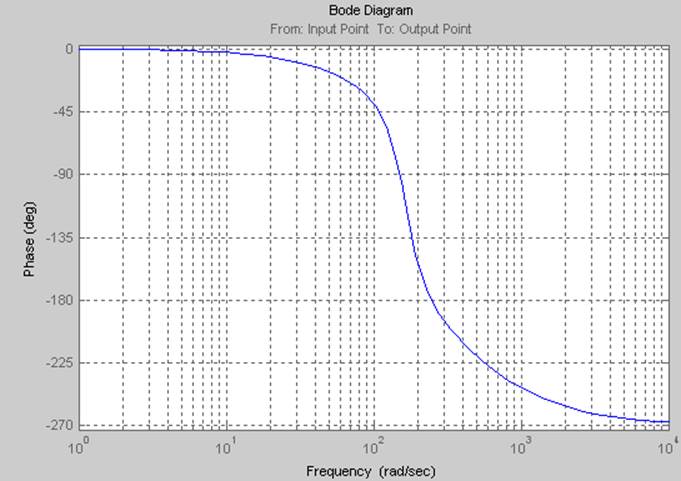
Рис. 14. ЛФХ скорректированной системы.
Переходный процесс при наличие узла коррекции устанавливается, (рис. 13) причем показатель колебательности составляет 1,38 рад, а время переходного процесса (±5% от установившегося значения) составляет 0,06 с. Как видно желаемая ЛАХ пересекает ось частот раньше чем ЛФХ достигает 1800 (рис. 14), что свидетельствует о устойчивости скорректированной системы.
Запишем передаточную функцию корректирующей системы по виду ЛАХ корректирующего устройства: излом ЛАХ коррекции вверх – звено стоит в числителе, ЛАХ коррекции загибается вниз – ставим звено в знаменатель:
Для реализации данной передаточной функции необходима следующая схема (рис. 16):
Рис. 16 Схема корректирующего звена
Находим значения коэффициентов передачи корректирующего устройства:
Данная схема реализует следующую передаточную функцию:
Должно выполняться
следующее условие: постоянная времени числителя должна быть больше постоянной
времени знаменателя (т.е. ![]() ).
Для нахождения параметров электрической цепи нужно решить систему уравнений:
).
Для нахождения параметров электрической цепи нужно решить систему уравнений:
![]()
![]()
Исходя из полученной ранее ЛАХ корректирующего звена – определим КК(0), КК(∞) и постоянные времени:

![]()
![]()
После подбора параметров были получены следующие значения:
R1=4 кОм, R2=121 кОм, R3=121 кОм, R4=4 кОм, C1=1 мкФ.
Проверка:
 ;
;
 .
.
Таким образом, построение ЛАХ корректирующего звена выполнено с необходимой степенью точности. При суммировании ЛАХ каждого из элементарных звеньев была получена наша ЛАХ коррекции.
9. Заключение.
В данном курсовом проекте, исходя из требований технического задания, была выполнена работа:
- по анализу нагрузки;
- выбран исполнительный двигатель;
- построена механическая характеристика электродвигателя;
- рассчитано оптимальное передаточное отношения редуктора;
- рассчитаны основные параметры редуктора;
- сконструирован редуктор;
- выбран измеритель рассогласования;
- проведен динамический анализ системы;
- рассчитано звено коррекции;
В приложении 1 приведен сборочный чертеж редуктора, в приложении 2 – схема компоновочная.
Разработанная система удовлетворяет всем требованиям, предъявленным в техническом задании.
Список используемой литературы:
1. Герман В.Г., Земляков Н.Д., Сусленникова Е.Ю. Автоматизированные приводы летательных аппаратов. Выбор электродвигателя. Учебное пособие. Л.: 1991 г.
2. Гусев С.А., Шишлаков В.Ф. Синтез систем автоматического управления. Методические указания по курсовому проектированию. СПбГУАП. СПб., 2000 г.
3. Шишлаков В.Ф. Проектирование электронных усилительных устройств автоматического управления. Учебное пособие. СПбГУАП. СПб., 2005 г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.