Область допустимых значений передаточного числа редуктора определятся уравнением:

Найдя корни этого квадратного уравнения относительно i, получаем:
-
минимально допустимое передаточное отношение ![]()
-
максимально допустимое передаточное
отношение ![]()
Для нахождения оптимального передаточного числа с точки зрения быстродействия системы нужно найти экстремум функции
а)
Рисунок 1 -
График зависимости ![]() :
а – область допустимых значений передаточного числа редуктора; б – запретная
область для передаточного числа.
:
а – область допустимых значений передаточного числа редуктора; б – запретная
область для передаточного числа.
Рисунок 2 - График зависимости ![]() :
– оптимальное передаточное отношение редуктора с точки зрения
ускорения.
:
– оптимальное передаточное отношение редуктора с точки зрения
ускорения.
Эта функция имеет максимум в точке i = 800 (см. рисунок 2), это передаточное отношение является наилучшим с точки зрения ускорения, но эта точка лежит правее точки i0, при этом увеличивается инерционность редуктора и его массогабаритные показатели, поэтому принимаем передаточное число i0, которое было получено на предварительном этапе расчета.
3. Расчет основных параметров редуктора.
3.1 Число пар зубчатых колес.
где:
i – передаточное отношение редуктора.
Передаточные числа первых двух пар выбираются в пределах 2-3, а третьей и последующих - в пределах 4-8.
Определение числа зубьев каждого колеса.
Для определения числа зубьев колес нужно предварительно задаться числом зубьев ведущих колес.
|
число зубцов ведущего колеса |
число зубцов ведомого колеса |
|
Z1 = 20 |
Z2 = 40 |
|
Z3 = 20 |
Z4 = 60 |
|
Z5 = 20 |
Z6 =60 |
|
Z7 = 20 |
Z8 = 80 |
|
Z9 = 20 |
Z10 = 80 |
Передаточное число всего редуктора получается как произведение передаточных отношений всех пар зубчатых колес:
![]()
3.2 Расчет модуля.
Расчет модуля производится для самой нагруженной ступени зубчатого механизма.
 , где:
, где:
kb - коэффициент ширины зуба;
s - допустимое напряжение материала колеса при расчете на выносливость;
Z2n – число зубьев выходного колеса.

Выбранное значение модуля должно быть не меньше полученного, для обеспечения прочности зубчатого колеса. Значение модуля выбирается из нормального ряда регламентированного государственным стандартом. Выберем модуль, равный 1 мм.
3.3 Расчет диаметров зубчатых колес.
Диаметр каждого колеса вычисляется как произведение модуля на число зубьев. .
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.4 Расчет ширины колеса.
Ширина колеса рассчитывается как произведение коэффициента ширины зуба на модуль.
![]()
где: y - коэффициент ширины зуба (4-10).
3.5 Момент инерции редуктора

где: r - плотность материала колес(r =8000 кг/м³);
b – ширина колес.
![]()
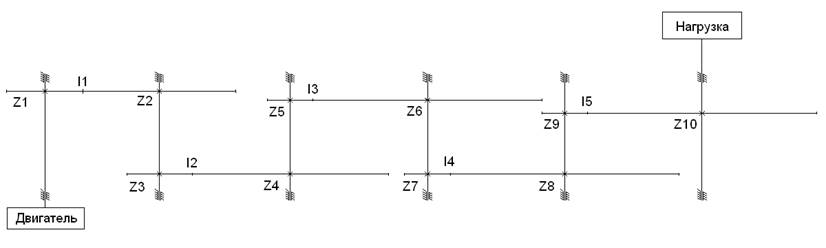
Рисунок 3 - Кинематическая схема редуктора.
После расчета момента инерции редуктора необходимо выполнить проверку выбранного двигателя с учетом инерционных свойств редуктора.
Максимальное значение пускового момента должно быть меньше пускового момента двигателя.
 , где:
, где:
![]() -
предварительное передаточное отношение редуктора; h - КПД редуктора; Jq – момент инерции редуктора; sin(wn×t) = 1.
-
предварительное передаточное отношение редуктора; h - КПД редуктора; Jq – момент инерции редуктора; sin(wn×t) = 1.
 .
.![]()
Величина эквивалентного момента должна быть меньше номинального момента на валу исполнительного двигателя.
 ,
,

Результаты проверки показали, что выбранный двигатель удовлетворяет условиям пригодности исполнительного двигателя.
Эскиз конструкции электродвигателя ДП40-10-3-12 представлен на рисунке 4.
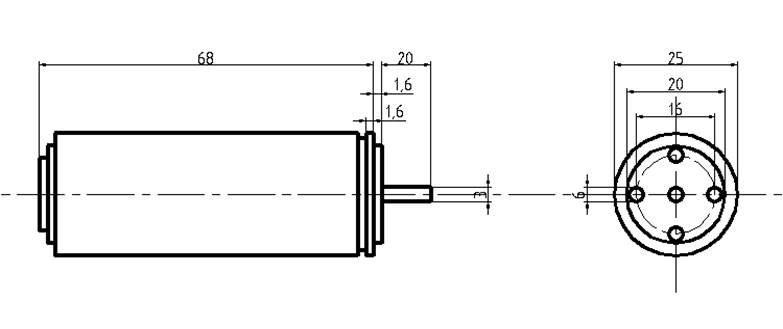
Рисунок 4 – Эскиз конструкции электродвигателя ДП40-10-3-12
4. Построение механической характеристики исполнительного двигателя.
Вычислим пусковой ток для определения класса мощности выбранного двигателя:
![]()
Так как Iп<20 А, следовательно двигатель ДП40-10-3-12 является двигателем малой мощности, в этом случае допускается линеаризация механической характеристики двумя прямыми.
Построение механической характеристики:
-на оси Х откладываем точку пускового момента,
-откладываем точку пересечения номинального момента и номинальной ско рости;
-соединяем две полученные точки и продлеваем до пересечения с осью У.
-на оси У откладываем точку αΩ·Ωном, где αΩ=1,1÷1,3 – коэффициент запаса.
-соединяем эту точку с полученной ранее прямой параллельно оси Х.
Уравнение прямой при Ω≤ αΩ·Ωном аналитически описывается:
 ,
,
где
: 
Далее на графике отложим точку, соответствующую максимальному моменту нагрузки двигателя и максимальной скорости вращения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.