Эта точка находится на пересечении частоты вращения 300 рад/с и момента на валу двигателя 0,03 Нм, так как точка находится внутри области графика, следовательно, в любой момент времени двигатель сможет отработать нагрузку.
На рис.6. представлена механическая характеристика двигателя ДП40-10-3-12 и отложенная на ней точка максимального момента и максимальной скорости нагрузки.
 Рисунок
– Механическая характеристика исполнительного двигателя
Рисунок
– Механическая характеристика исполнительного двигателя
7. Выбор измерителя рассогласования.
Измерители рассогласования – звено системы управления, предназначенное преобразования конкретного неэлектрического параметра (угол поворота исполнительного элемента, скорость вращения нагрузки ) в электрический сигнал.
Измеритель рассогласования строится на основе первичных измерительных преобразователей (ПИП), соединенных по каскадной или компенсационной схеме.
В качестве ПИП применяются:
-потенциометры;
-сельсины;
-вращающиеся трансформаторы, если требуется отследить отработку угла поворота;
-тахогенераторы, если нужно отследить отработку по скорости;
Так как разрабатываемая система постоянного тока требует отработки по ограниченному углу поворота, то в качестве ПИП выбираем потенциометры, соединенные по компенсационной схеме. На рис. 8 приведена структурная схема измерителя рассогласования на потенциометрах, построенного по компенсационной схеме.
Рис. 8. Измеритель рассогласования на потенциометрах,
построенный по компенсационной схеме
![]()
Для построения измерителя рассогласования берут одинаковые потенциометры с одинаковым сопротивлением.
![]() -
коэффициент передачи измерителя рассогласования.
-
коэффициент передачи измерителя рассогласования.
![]()
Тогда коэффициент передачи измерителя рассогласования вычисляется по формуле:
Ошибка измерителя рассогласования (ИР)
![]()
где ![]() допустимые
ошибки датчика и приемника соответственно.
допустимые
ошибки датчика и приемника соответственно.
где
![]() -
допустимое отклонение выходного напряжения от линейной зависимости.
-
допустимое отклонение выходного напряжения от линейной зависимости.
![]() -
максимальный угол поворота.
-
максимальный угол поворота.
Так как в нагрузке стоит антенна, тогда учитывается гармоническая ошибка
Ошибка ИР должна быть меньше допустимой ошибки:

Был выбран потенциометр ПТП-51, второго класса точности (см. табл.3).
Таблица 3.
|
|
|
|
|
|
|
|
|
360 |
0,54 |
500-2000 |
5 |
0,1 |

![]() .
.
Коэффициент передачи ИР:
 .
.
8. Анализ динамических свойств системы.
Рис. 6. Структурная схема привода антенны.
Мс – момент сопротивления;
a – угол поворота объекта управления;
Км – коэффициент пропорциональности между напряжением и моментом:

КW – коэффициент пропорциональности между напряжением и скоростью:
 ;
;
![]() –
момент инерции исполнительного двигателя и передаточного механизма,
приведенный к выходному валу:
–
момент инерции исполнительного двигателя и передаточного механизма,
приведенный к выходному валу:
 ;
;
Су – коэффициент упругого
скручивания, принимается равным:  .
.
Из структурной схемы, приведенной на рисунке 6, получается следующая передаточная функция для привода антенн:
 ,
,
Общий коэффициент передачи СУ:
 ,
,
Коэффициент исполнительного механизма:

 ,
,
 ,
,

После преобразования структурной схемы (рис.6), и подстановки найденных коэффициентов, получили располагаемую передаточную функцию системы (рис.7)
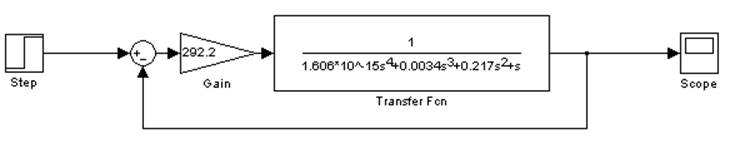
Рис. 7.Располагаемая передаточная функция.
В программе Simulink, было смоделировано воздействие единичной ступенчатой функции, и получен переходный процесс (рис.8).
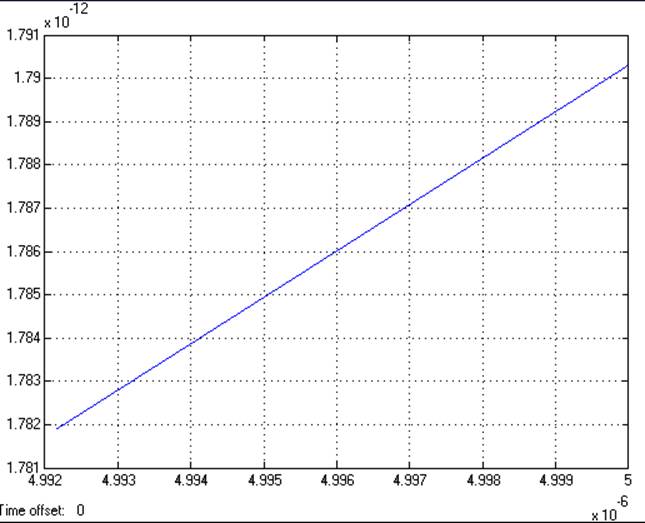
Рис. 8. Переходный процесс.
Поскольку первая постоянная в знаменателе очень мала, и как видно из переходного процесса изображенного на рис. 8 она не оказывает влияния на дальнейший переходный процесс рис.10, то далее мы ей пренебрегаем (рис.9).

Рис. 9.Располагаемая передаточная функция, без учета высокочастотной составляющей.
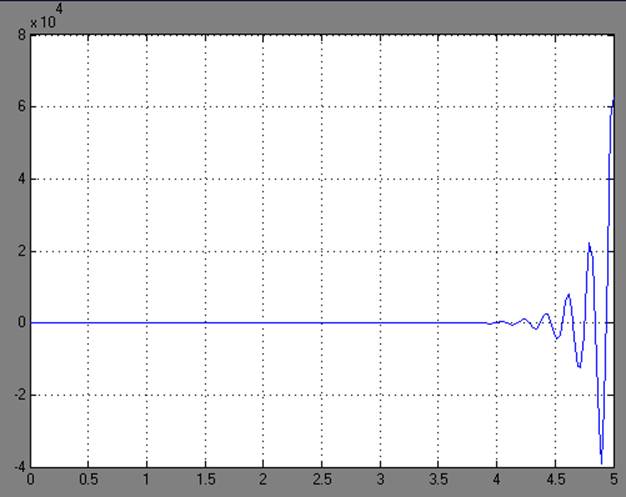
Рис. 10. Переходный процесс без учета высокочастотной составляющей.
Как видно из рис. 10 переходный процесс является расходящимся. Поэтому необходимо проектирование корректирующего звена. Для его построения нужно представить передаточную функцию в другом виде, при котором в знаменателе стоят элементарные сомножители. После решения знаменателя относительно р были найдены корни:
p1 =0
p2 = -3,583
p3 = -55,81
p4= -125881168117,84
Т1=6,424·10-14, Т2=0,199 с, ξ=0.1.
Тогда передаточную функцию можно представить в виде:

Для привода антенн,
который изначально является астатическим, запретная область в низкочастотной
части ЖЛАХ строится по контрольной точке Ак на основании частоты ![]() и ординаты L(
и ординаты L(![]() ).
).
Частота ![]() определяется
по формуле:
определяется
по формуле:
 ,
с-1
,
с-1
где ![]() -
наибольшее угловое ускорение, с-2;
-
наибольшее угловое ускорение, с-2;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
