Обычно число отсчетов ограничено
числом ![]() .
.
 -
ошибочное значение, если будет восстанавливаться сигнал по той формуле, то
-
ошибочное значение, если будет восстанавливаться сигнал по той формуле, то
 ,
,  - количество отсчетов
- количество отсчетов
 -
среднеквадратическая ошибка, она возникает из-за конечного числа отсчетов
сигнала. Общая ошибка:
-
среднеквадратическая ошибка, она возникает из-за конечного числа отсчетов
сигнала. Общая ошибка:
![]()
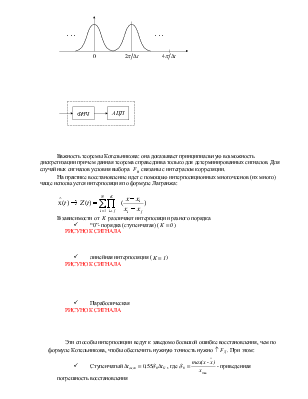
Восстановление непрерывной
функции в соответствии с формулой Котельникова![]() может
выполняться двумя способами:
может
выполняться двумя способами:
1. Фильтровой
2. Интерполяционный
Фильтровой заключается в том,
что мы подаем отсчеты сигнала на фильтр, импульсная характеристика которого
совпадает с базисной функцией ![]() :
:
такую импульсную характеристику имеет фильтр у которого частотная характеристика прямоугольная.
Это физически нереализуемый
фильтр, поэтому возникают дополнительные погрешности. При интерполяционном
способе восстановления необходимо создать ![]() функций:
функций:
 , затем умножить их на дискретные
отсчеты сигнала и просуммировать. Поэтому на практике формула Котельникова не
используется. При дискретизации сигнала важно правильно определить частоту
, затем умножить их на дискретные
отсчеты сигнала и просуммировать. Поэтому на практике формула Котельникова не
используется. При дискретизации сигнала важно правильно определить частоту ![]() , т. к. спектр дискретного сигнала
периодический по частоте.
, т. к. спектр дискретного сигнала
периодический по частоте.
Важность теоремы Котельникова:
она доказывает принципиальную возможность дискретизации причем данная теорема
справедлива только для детерминированных сигналов. Для случайных сигналов
условия выбора ![]() связаны с интегралом корреляции.
связаны с интегралом корреляции.
На практике восстановление идет с помощью интерполяционных многочленов (их много) чаще используется интерполяция по формуле Лагранжа:
В зависимости от ![]() различают интерполяции разного порядка
различают интерполяции разного порядка
ü
“0”- порядка (ступенчатая) (![]() )
)
РИСУНОК СИГНАЛА
ü
линейная интерполяция (![]() )
)
РИСУНОК СИГНАЛА
ü Параболическая
РИСУНОК СИГНАЛА
Эти способы
интерполяции ведут к заведомо большой ошибке восстановления, чем по формуле
Котельникова, чтобы обеспечить нужную точность нужно ![]() .
При этом:
.
При этом:
ü
Ступенчатый![]() , где
, где  - приведенная погрешность восстановления
- приведенная погрешность восстановления
ü
Линейная ![]()
ü
Параболическая ![]()
где ![]() .
.
Методика расчета нужного интервала дискретизации следующая:
1.
Задают величину допустимой погрешности ![]()
2.
Определяют по сигналу ![]()
3.
По определенному ![]() находят
находят ![]()
4. Выбирают вид интерполяции
5. Рассчитывают требуемый интервал дискретизации
Квантование непрерывных сигналов
Суть квантования заключается в том, что бесконечное множество значений сигнала заменяется дискретным конечным множеством заранее установленных значений. В итоге непрерывная шкала мгновенных значений сигнала заменяется дискретной шкалой уровней квантования.
Шаг кантования  , где
, где ![]() -
максимальное значение сигнала
-
максимальное значение сигнала
![]() -
число уровней квантования
-
число уровней квантования
Уровни квантования могут идти с постоянным или с переменным шагом, изменяющимся по некоторому правилу, учитывающем статистику сигнала. Чаще используют равномерное квантование.
РИСУНОК СИГНАЛА
Способы квантования:
1. Заменяем значение квантуемой величины ближайшим нижним значением сетки квантования
2. Заменяем ближайшим верхним
3. Заменяем ближайшим верхним или нижним (округление)
Рассмотрим правило округления:
РИСУНОК СИГНАЛА
Возникает ошибка ![]() причем
причем ![]() . Ошибка
квантования – шум квантования, его характеристики могут быть различными, но его
влияние всегда оценивают мощностью
. Ошибка
квантования – шум квантования, его характеристики могут быть различными, но его
влияние всегда оценивают мощностью
РИСУНОК СИГНАЛА
Запишем отношение сигнал шум квантования:
 , где
, где
 -
пикфактор сигнала, - шаг квантования,
-
пикфактор сигнала, - шаг квантования, ![]() - число уровней квантования, а r- число разрядов квантователя.
- число уровней квантования, а r- число разрядов квантователя.
Если сигнал равномерно
распределен, то ![]() , а
, а  . Чаще
всего отношение С/Ш выражают в децибелах:
. Чаще
всего отношение С/Ш выражают в децибелах:
Современные АЦП имеют число
разрядов больше 10 – С/Ш больше 60 дБ. ![]() зависит
как от числа уровней квантования, так и от самого сигнала.
зависит
как от числа уровней квантования, так и от самого сигнала.
Преобразование дискретного сигнала в цифровую форму.
Данная процедура заключается в
замене мгновенного значения сигнала цифровым представлением выбранного типа
квантования. Важно правильно выбрать основание системы счисления. Пусть для
представления квантованного значения используется система счисления с основанием
![]() и числом разрядов
и числом разрядов ![]() ,
тогда число возможных элементов кода равно их произведению:
,
тогда число возможных элементов кода равно их произведению:
![]() .
.
Нужно выбрать ту систему счисления где U минимально.
Параметры сигнала:
![]() , отсюда
, отсюда
![]()
 получаем
получаем
Дифференцируем полученное выражение по n и приравниваем полученное выражение к нулю:
![]()
![]()
Таблица для различных оснований систем счисления:
|
n |
2 |
2,71 (е) |
3 |
4 |
8 |
10 |
12 |
|
|
1,06 |
1 |
1,006 |
1,06 |
1,42 |
1,58 |
1,77 |
Предварительная обработка оцифрованных данных.
Наиболее типичные преобразования:
1. Изменение формата обрабатываемых данных. АЦП выдает данные в одном формате, а процессору нужен другой. Для согласования надо предусматривать составление соответствующих программ для этих преобразований.
2. Преобразование данных в реальные физические величины. Одновременно с преобразованием полученных результатов идет преобразование калибровочного сигнала, создается эталон физической величины. В этом случае для преобразования в физические величины определяется соотношение между цифровым представлением отсчетов и эталонным сигналом (калибровка аппаратуры). Эта операция нужна не всегда (иногда нет оценки параметров). Вычисления могут идти в безразмерных величинах, но это должно быть учтено в программе, все расчеты в безразмерной форме.
3. Улучшение данных. Нужно обнаружить и исключить паразитные выбросы, смещение нулевого уровня, тренд и т.д.
РИСУНОК СИГНАЛА
4. Выделение полезных составляющих на фоне мешающих
РИСУНОК СИГНАЛА
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.