3. Вычисляется значение коэффициента αn
4. Вычисляется значение коэффициента βn
5. Загрузка в соответствующие регистры значений yn-1* и un-1*, полученных в предыдущем обзоре.
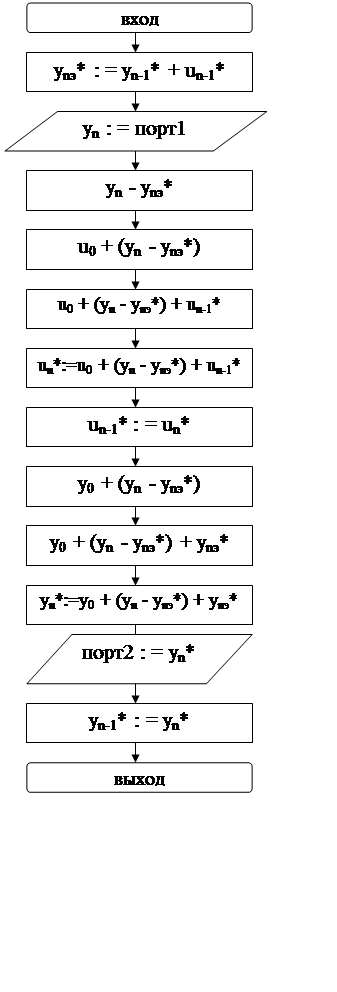
6. Реализация сумматора 3: ynэ* : = yn-1* + un-1*
7. Считывание с порта: yn : = порт1
8. Реализация сумматора 1: yn - ynэ*
9. Реализация блока умножения на βn: βn(yn - ynэ*)
10. Реализация сумматора 2: un* : = u0 + βn(yn - ynэ*) + un-1*
11. Реализация линии задержки: un-1* : = un*
12. Реализация блока умножения на αn: αn(yn - ynэ*)
13. Реализация сумматора 4: yn* : = y0 + αn(yn - ynэ*) + ynэ*
14. Вывод информации в порт: порт2 : = yn*
15. Реализация линии задержки: yn-1* : = yn*
16. Возвращение в главную программу.
Будем производить сглаживание при n = 2. В этом случае:
αn = (2(2n – 1)) / (n(n-1)) = 1;
βn = 6 / (n(n+1)) = 1.
Будем использовать обозначения: порт1 – порт ввода, порт2 – порт вывода. При этих допущениях алгоритм претерпит некоторые изменения и блок – схема алгоритма будет выглядеть следующим образом:
MOV r1, u0
MOV r2, y0 MOV A, 00
MOV r4, un-1
MOV r5, yn-1
ADD A, r4
ADD A, r5
MOV r3, A
IN P1
SUB r3
MOV r3, A
ADD r1
ADD r4
MOV r4, A
MOV A, r3
ADD r2
ADD r5
ADD r4
MOV r5, A
OUT P2
1
1
1
1
1
1
2
1
1
1
1
1
1
1
1
1
1
2
1
1
загрузка начального приращения.
загрузка начального значения координаты.
обнуление аккумулятора.
загрузка приращения, полученного в прошлом обзоре загрузка координаты, полученной в прошлом обзоре.
выполнение операций сложения, в результате в аккумуляторе – экстраполированная координата.
сохранение экстраполированной координаты.
считывание с порта значения координаты. вычисление приращения и сохранение его в соответствующем регистре.
вычисление сглаженного значения координаты.
вывод в порт сглаженного значения координаты.
1. Техническое задание. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 2
2. Обзор литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 3
3. Введение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 4
4. Постановка задачи. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 5
5. Расчет основных характеристик . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 8
6. Разработка структурной схемы. . . . . . . . . . . . . . . . . . . . . . . . . . . стр. 11
7. Цифровая реализация алгоритма сглаживания. . . . . . . . . . . . . . стр. 13
8. Разработка блок-схемы программы. . . . . . . . . . . . . . . . . . . . . . . .стр. 16
9. Разработка текста программы. . . . . . . . . . . . . . . . . . . . . . . . . . . . стр. 18
10.Заключение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .стр. 19
11.Содержание. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . стр. 20
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.