Минимальная дальность действия РЛС:
Минимальная дальность (величина мертвой зоны) рассчитывается исходя из длительности импульса и времени переключения антенны с передачи на прием Тпер. Величина Тпер определяется временем деионизации газа в разряднике антенного переключателя и равна примерно 1 – 3 мкс. Примем ее равной 2 мкс.
Dмин = ((Тпер + τи ) * с) / 2 = ((2 * 10-6 + 2 * 10-6)* 3 * 108) / 2 = 600 м;
Разрешение по дальности:
Разрешение по дальности рассчитывается исходя из длительности зондирующего импульса:
ΔD = (τи * с) / 2 = (2 * 10-6 * 3 * 108) / 2 = 300 м;
Сектор обзора:
Сектор обзора был выбран равным 9° по азимуту и 9° по углу места;
Разрешение по азимуту:
Разрешение по азимуту можно вычислить по выбранному коэффициенту перекрытия по азимуту, а также зная ширину диаграммы направленности антенны:
Δφаз = φаз / Кп = 2 / 40 = 3°°
Разрешение по углу места:
Разрешение по углу места вычисляется аналогично разрешению по азимуту:
Δφум = φум / Кп = 2 / 40 = 3°°
СКО измерения угла:
Ширина диаграммы направленности равна 2°. СКО рассчитывается по следующей формуле: σφ = Θ / (q)½. То есть мы можем сказать, что для обеспечения СКО, равного 10-2 необходимо обеспечить отношение сигнал/шум:
q = (Θ / σφ)2 = 2500;
Согласно теореме Котельникова частота дискретизации должна быть такова, чтобы в длительность одного импульса укладывалось как минимум 2 – 3 такта. Длительность импульса у нас: τи = 2 мкс, значит отсчеты должны следовать с периодом не более 1 мкс.
Fдискр мин = 1 / 10-6 = 1 МГц;
Исходя из выбранной частоты дискретизации, а также рассчитанных параметров определим требуемые параметры процессора:
Разрядность процессора:
В нашем случае будет производиться цифровая реализация алгоритма сглаживания координат по углу места и азимуту, поэтому разрядность процессора рассчитывается исходя из размера просматриваемого сектора пространства и разрешения по угловым координатам. Сектор обзора имеет квадратную форму, разрешение по обеим координатам одинакова, а значит рассчитывать разрядность процессора два раза не требуется.
mφ = log2(φмакс/Δφ) = log2(9°/3°°) ≈ 7.5, значит mφ = 8;
Тактовая частота:
Тактовая частота процессора, реализующего заданный алгоритм, выбирается исходя из количества машинных циклов, за которое выполняется программа, реализующая данный алгоритм. Также необходимо учесть, что программа должна быть полностью «отработана» до того, как поступит новый отсчет сигнала, поэтому:
Nц = 22; Fдискр мин = 1 МГц;
Fтакт мин = Nц * Fдискр мин = 1* 22 = 22 МГц;
6.Разработка структурной схемы.
Выбор процессора.
Рассчитанные данные позволяют нам выбрать микропроцессор, на котором можно будет произвести цифровую реализацию заданного алгоритма:
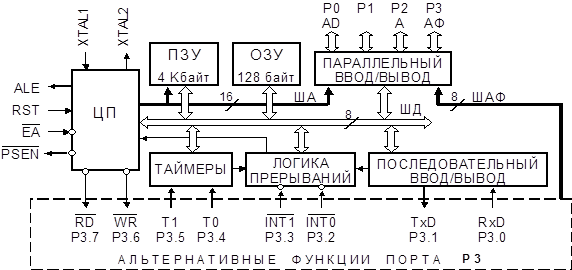
Нам подходит процессор MCS – 51 80C52
Его характеристики:
Тактовая частота: 24 МГц
Память программ ПЗУ: 8 к
ОЗУ: 256
Количество таймеров/счетчиков: 3
Линий ввода/вывода: 32
Аналоговый вход: отсутствует
Тип корпуса: 44LPLCC, 40LDPDIP, 44LDQPF
Защита: 1 Lock Bits
 |
(a)
 |
(б)
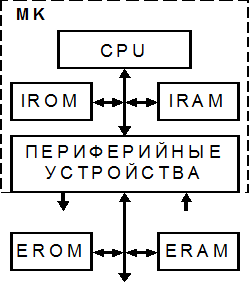
Рис. 4. (а) типовая структура микропроцессора серии MCS – 51,
(б) укрупненная структура микропроцессора серии MCS –51.
Структурная схема, соответствующая выбранным элементам и ранее описанной общей структурной схеме приведена в приложении.
7.Цифровая реализация алгоритма сглаживания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.