Слежение за траекторией цели включает в себя слежение за четырьмя координатами цели. Это скорость, дальность, угол места и азимут.
Для принятия решения о наличии цели и определения параметров ее траектории необходимо проанализировать информацию за несколько обзоров. Конечной целью является определение траектории цели. Автоматическая обработка координат отметки, полученных за несколько обзоров РЛС называется вторичной обработкой радиолокационной информации.
Задача оптимальной оценки координат и параметров траектории движущейся цели формулируется следующим образом. С устройства автозахвата через равные промежутки времени T0, на вход устройства автосопровождения поступает информация о координатах цели. Информация искажена. По дискретным отметкам с ошибками необходимо построить траекторию движения цели. Для этого сначала нужно выбрать функцию Y(t), описывающую изменение координат во времени, а затем найти оценки параметров этой функции. Y(t) получила название сглаживающей функции. Выбор типа сглаживающей функции соответствует выбору гипотезы о законе движения цели.
Примем следующие упрощения:
1. Сопровождается одна цель.
2. Траектория лежит в горизонтальной плоскости.
3. Каждая из координат представляется временным полиномом. Степень полинома задается соответствующими гипотезами. Коэффициенты полинома случайны и могут принимать произвольные значения. Корреляционная связь между коэффициентами полинома отсутствует.
4. Система работает по каждой координате в отдельности. Рассматриваем одну координату, остальные аналогичны.
При принятых предположениях задача сводится к оценке математического ожидания полиномиальной функции со случайными коэффициентами.
Для сглаживания координат и скорости воспользуемся методом последовательного сглаживания, который состоит в том, что сглаженные значения в очередном n-ном обзоре определяются по предыдущим (n – 1) сглаженным значениям и результатам n-ого наблюдения.
Введем следующие обозначения:
yn - значение координаты, полученное от датчиков в n – ом обзоре
yn* - сглаженное значение координаты в n – ом обзоре
ynэ* - экстраполированное значение координаты в n – ом обзоре
un* - значение приращения координаты в n – ом обзоре
Исходные математические выкладки:
Исходные уравнения правдоподобия:
Этому алгоритму соответствует структурная схема:
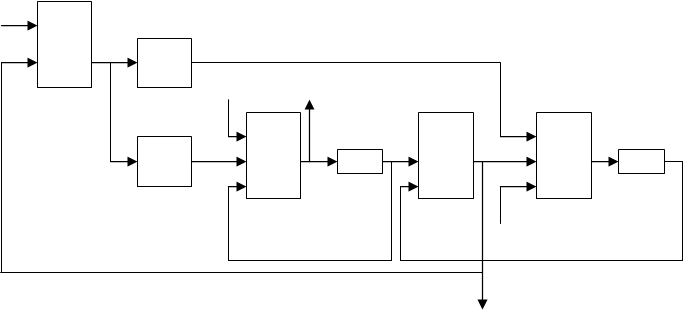 |
Дадим словесное описание алгоритма.
1. Вводится начальное значение координаты y0.
2. Вводится значение первого приращения u0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.