составляющих сил и моментов по осям системы координат схвата. Определяют ось наименьшего запаса несущей способности схвата. По коэффициенту несущей способности определяют усилие захвата, обеспечивающее жесткое фиксирование детали при существующих динамических нагрузках.
7. Выбирают тип привода и параметры двигателя. Параметры пневмопривода выбирают с учетом требуемого быстродействия. Выбор основных параметров электродвигателя связан с применяемым редуктором, быстродействием, необходимым усилием. В случае фиксирования детали в схвате только за счет силы трения основным условием является обеспечение требуемого усилия захватывания, гарантирующего необходимые силы трения.
8. Определяют вид и параметры механизма передачи, реализующего требуемое передаточное число, возможный вид зависимости усилия схватывания от величины раскрытия схвата, требуемую кинематику перемещения рабочих элементов.
9. Проводится серия проверочных расчетов и в случае необходимости - корректировка параметров схвата.
Пневматические захватные устройства обладают особым достоинством, заключающимся в том, что сила захватывания и удержания распределяется на значительную поверхность, благодаря чему с их помощью можно захватывать и перемещать хрупкие и непрочные изделия из стекла, пластмассы, керамики и металлов. Захватные устройства струйного типа дают возможность бесконтактного захватывания тщательно обработанных легких деталей электровакуумной, полупроводниковой и приборостроительной промышленности. С помощью вакуумных захватных устройств возможно захватывание и удержание громоздких и тяжеловесных изделий с достаточно сложной поверхностью независимо от материала, из которого они изготовлены. Недостатком является необходимость принятия специальных мер для обеспечения надежной подачи сжатого воздуха или поддержания устойчивого вакуума.
Пневматические захватные
устройства подразделяются на пневмокамерные и струйные; могут быть низкого (до
0,5 10![]() Па) и
высокого (более 0,510
Па) и
высокого (более 0,510![]() Па)
давления; по числу захватных элементов могут быть одиночными и групповыми.
Па)
давления; по числу захватных элементов могут быть одиночными и групповыми.
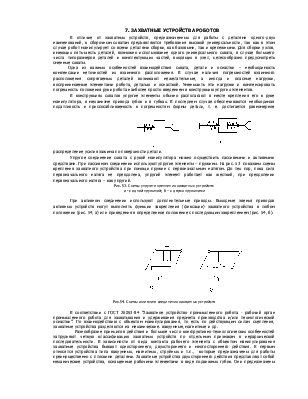
Пневмокамерные захватные устройства - это устройства, в которых в качестве привода, воздействующего непосредственно на захватывающие органы стенки камеры, используют давление сжатого воздуха. По конструктивному признаку они подразделяются на камерные (надувные) наружного и внутреннего захватывания, а также шланговые (пальцевые). Типовые конструкции таких захватных устройств показаны на рис.56.
|
|
Рис.56. Пневмокамерные захватные устройства внутреннего (а)
и внешнего (б) захватывания
Грузоподъемность пневмокамерных захватных устройств зависит от целого ряда факторов: формы захватываемой поверхности и ее шероховатости, площади поверхности захвата, направления силы веса захватываемого объекта по отношению к оси захвата. Наиболее неблагоприятным является случай захватывания по цилиндрической поверхности. При этом в случае вертикального расположения захвата сила веса G объекта будет уравновешиваться суммарной силой трения Pтр между поверхностями соприкосновения объекта и захвата (см.рис.56, б).
Сила
трения Pтр в свою очередь зависит от нормального усилия прижатия стенки камеры
к объекту, то есть от давления ![]() в камере захватного устройства и от
коэффициента трения f. Таким образом, требуемое усилие удержания
в камере захватного устройства и от
коэффициента трения f. Таким образом, требуемое усилие удержания
P = Pтр = f pз F , где F - площадь поверхности захватывания, - коэффициент трения; pз - давление в пневмокамере.
Следовательно, можно либо, задавая значение давления в камере
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.