Будем считать, что несущая частота передатчика изменяется по закону
![]() 4.1
4.1
где ![]() - некоторое постоянное значение;
- некоторое постоянное значение;
![]() - быстрая модуляция несущей частоты
передатчика;
- быстрая модуляция несущей частоты
передатчика;
![]() - медленная модуляция несущей
частоты;
- медленная модуляция несущей
частоты;
С принципиальной точки зрения закон быстрой модуляций может быть любой периодической функцией времени: синусоидальной, пилообразной, треугольной и т. д.
Для
определенности будем считать, что он имеет симметричную треугольную форму с
периодом ![]() , так что для одного периода справедливо соотношение:
, так что для одного периода справедливо соотношение:
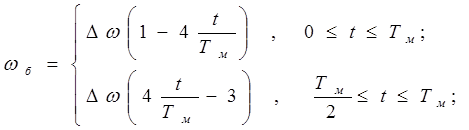
где ![]() девиация частоты при быстрой
модуляции.
девиация частоты при быстрой
модуляции.
Медленная модуляция осуществляется по линейному закону
 ,
, ![]() ,
,
где ![]() - максимальное смещение несущей
частоты за счет медленной модуляции;
- максимальное смещение несущей
частоты за счет медленной модуляции;
Т -
интервал усреднения, причем ![]()
где к-
целое и ![]()
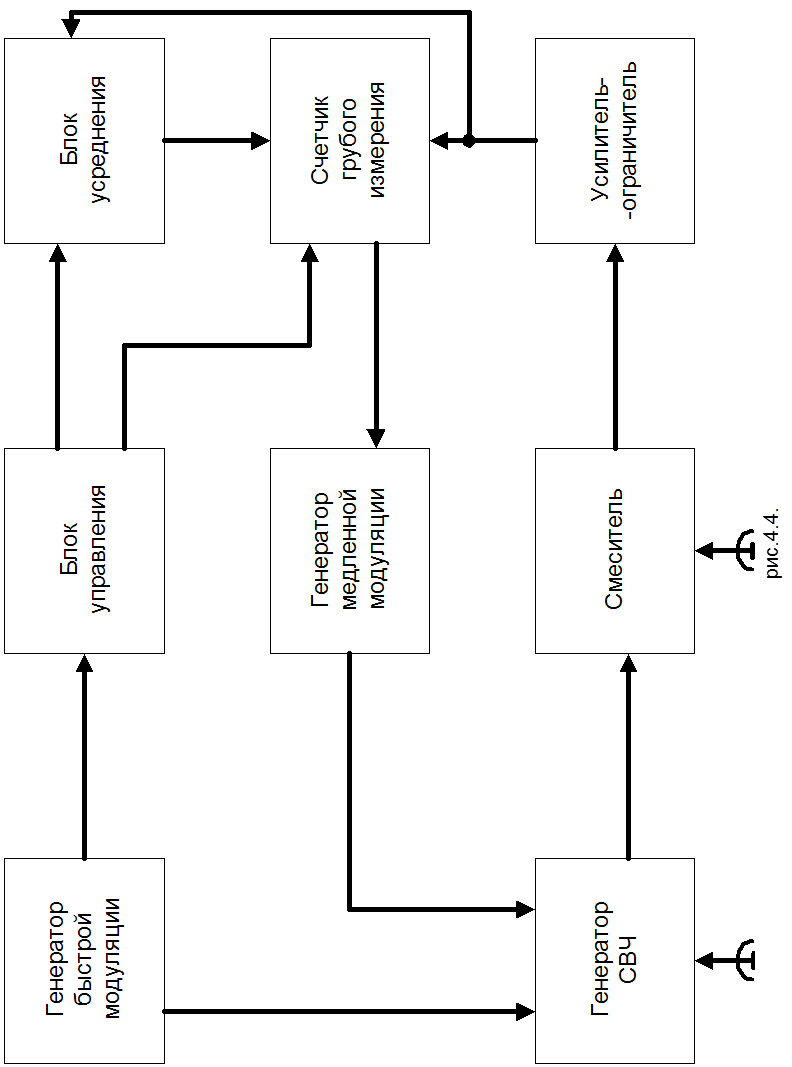
Сигнал биения на выходе смесителя определяется выражением:
![]()
где ![]() - фаза сигнала биения.
- фаза сигнала биения.
Будем рассматривать случай, когда  ,
,
где ![]() задержка отраженного сигнала.
задержка отраженного сигнала.
В
этом случае фаза ![]() сигнала биений определяется соотношением
сигнала биений определяется соотношением
![]()
или с учетом (1)
![]()
Графическое изображение фазы биений показано на рис.4.5а Горизонтальные линии на графике соответствуют значениям
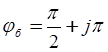 , j= 0,1,2,3…
, j= 0,1,2,3…
При этих значениях фазы сигнала биений пересекает линию нулевого уровня. Обозначим через N - число нуль - пересечений в сигнале биений на
 интервале монотонности функции
интервале монотонности функции ![]() (в дальнейшем интервал будем
называть полупериодом)
(в дальнейшем интервал будем
называть полупериодом)
Информация о задержке сигнала заключена в параметре ![]() , предоставляющем собой
диапазон изменения фазы биений за счет быстрой модуляции
, предоставляющем собой
диапазон изменения фазы биений за счет быстрой модуляции
![]() ,
,
откуда  ,
,
где  ;
;
 .
.
Физически величина ![]() выражает среднее число
нуль - пересечений за полупериод. В качестве измеряемого параметра удобно
рассматривать не
выражает среднее число
нуль - пересечений за полупериод. В качестве измеряемого параметра удобно
рассматривать не ![]() , а величину
, а величину ![]() , так как в этом случае
погрешность измерения
, так как в этом случае
погрешность измерения
![]()
где ![]() - оценка параметра
- оценка параметра ![]() ,
,
не посредственно показывает степень подавления дискретной ошибки по отношению к дальномеру без дополнительной медленной модуляции, поскольку в последнем максимальная величина этой ошибки равна 1.
Обозначим индексом i – номер полупериода ![]() ,
,
где  ,
,
i =1,2…2к, символом ![]() - число нуль -
пересечений на i-ом полупериоде.
- число нуль -
пересечений на i-ом полупериоде.![]()
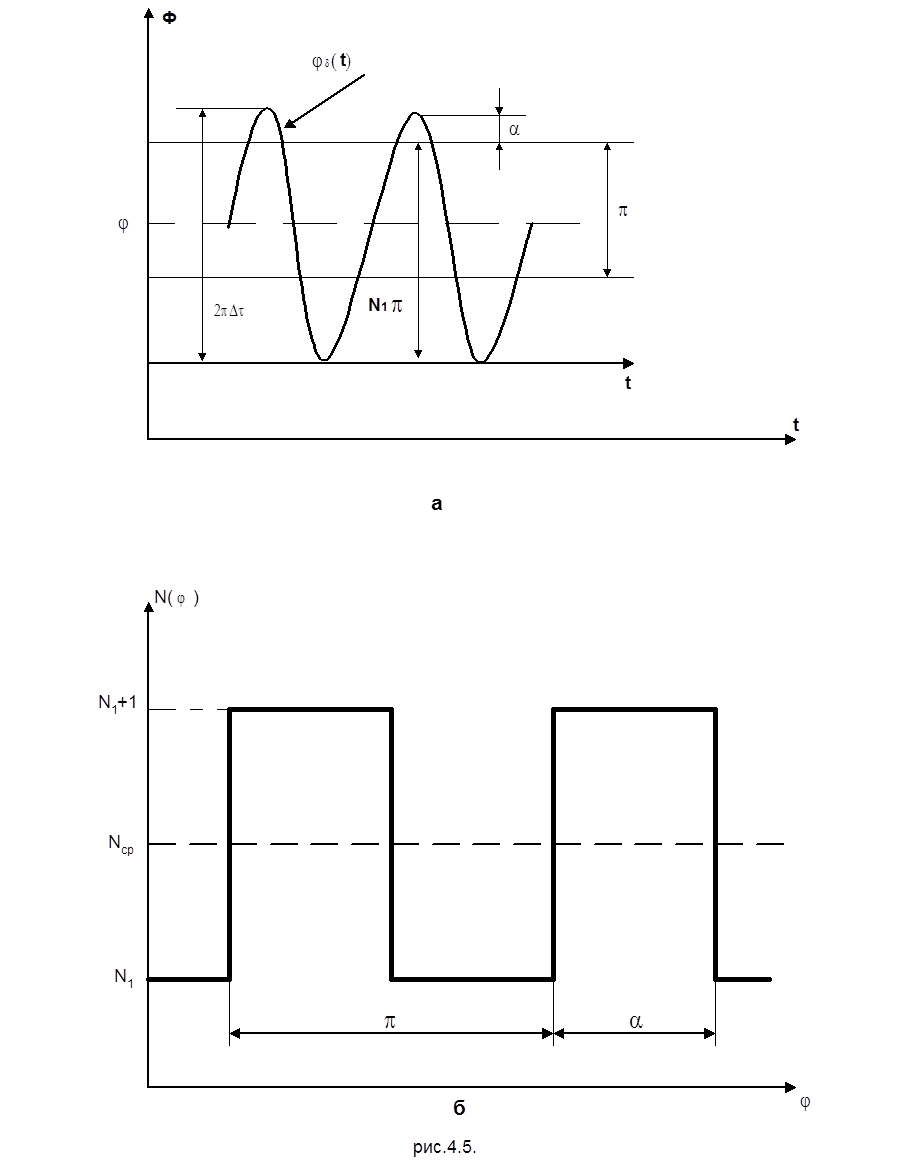
Изменение переменной ![]() от времени показано на
рис.4.5б. Каждый отсчет
от времени показано на
рис.4.5б. Каждый отсчет ![]() соответствует окончанию i-го полупериода и таким
образом
соответствует окончанию i-го полупериода и таким
образом ![]() (t) представляет собой функцию дискретного
времени. Функция
(t) представляет собой функцию дискретного
времени. Функция ![]() принимает всего лишь два значения:
принимает всего лишь два значения: ![]() и
и ![]() , где
, где ![]() - целая часть
- целая часть ![]() . Оценкой параметра
. Оценкой параметра ![]() считается
среднеарифметическое значение всех отсчетов
считается
среднеарифметическое значение всех отсчетов ![]() на интервале усреднения
Т
на интервале усреднения
Т
 4.2
4.2
Вместо функции дискретного времени ![]() (t) введем эквивалентную
ей в смысле среднего значения функцию непрерывного времени
(t) введем эквивалентную
ей в смысле среднего значения функцию непрерывного времени ![]() , которая на каждом
отдельно взятом полупериоде определена как
, которая на каждом
отдельно взятом полупериоде определена как
![]() .
.
Эту функцию можно считать периодической с периодом ![]() отклонение от
периодичности возникает за счет ее дискретности.
отклонение от
периодичности возникает за счет ее дискретности.
Тогда формула (4.2) заменится новым выражением
 .
.
Задача состоит в определении ошибки измерения
![]() ,
,
которая складывается из двух ошибок – дискретизации и усреднения. В соответствии с этим и задача делится на два этапа.
1.Заменим реальную функцию ![]() , идеальной
, идеальной ![]() , которая получается из
, которая получается из ![]() путем идеального
перехода при
путем идеального
перехода при ![]() :
:
![]() .
.
![]()
4. Временные
координаты положительных и отрицательных перепадов функции ![]() находятся соответственно из уравнений:
находятся соответственно из уравнений:
 , j=0,1,2…
, j=0,1,2…
где ![]() (3)
(3)
диапазон
измерения фазы биения за счет медленной модуляции. На рис. 1 координаты
перепадов соответствуют точкам пересечения огибающей максимумов и огибающей
минимумов функции ![]() с горизонтальными линиями.
с горизонтальными линиями.
Функция ![]() является периодической с периодом
является периодической с периодом ![]() и средним значением
и средним значением ![]() ( вычисленным за период ). Нетрудно
убедиться, что
( вычисленным за период ). Нетрудно
убедиться, что
![]() (4)
(4)
Далее для
функции ![]() найдем оценку ее среднего значения
найдем оценку ее среднего значения
 (5)
(5)
и ошибку усреднения
![]() .
.
Интервал
усреднения Т в общем случае не кратен периоду ![]() и
поэтому
и
поэтому ![]()
2.
Определим теперь отклонение среднего значения реальной функции ![]() от среднего значения функции
от среднего значения функции ![]()
![]() .
(6)
.
(6)
Величины ![]() слабо связаны друг с другом и могут
иметь разную полярность. Поэтому, если интересоваться максимальным значением
ошибки g
слабо связаны друг с другом и могут
иметь разную полярность. Поэтому, если интересоваться максимальным значением
ошибки g
![]() ,
,
то можно считать, что
![]()
где
![]() ,
,
![]()
Найдем ![]()
С учетом
(4) величину ![]() можно выразить через параметры функции
можно выразить через параметры функции ![]()
 (7)
(7)
где


![]() .
.
Обозначим
приращение фазы сигнала биений за счет медленной модуляции через ![]()
 (8)
(8)
и
перейдем от функции ![]() к функции
к функции ![]()
![]()
Сделав в (5) замену переменной (8) получим
Функция ![]() периодическая, ее период равен
периодическая, ее период равен ![]() . Для вычисления
. Для вычисления ![]() представим интервал
представим интервал ![]() в виде
в виде
![]()
где m –
целое, положительное число, ![]() . При фиксированных m и х погрешность
. При фиксированных m и х погрешность ![]() зависит от
зависит от ![]() и от сдвига функции N(
и от сдвига функции N(![]() ) относительно начала интервала
усреднения
) относительно начала интервала
усреднения ![]() . Разбив задачу на два случая :
. Разбив задачу на два случая : ![]() , нетрудно убедиться, что в обоих
случаях максимальная ошибка одинакова и наступает при
, нетрудно убедиться, что в обоих
случаях максимальная ошибка одинакова и наступает при ![]() при одновременном совпадении начала
интервала усреднения с одним из фронтов функции
при одновременном совпадении начала
интервала усреднения с одним из фронтов функции ![]() : если начало интервала усреднения
совпадает с положительным периодом ,то имеет место случай
: если начало интервала усреднения
совпадает с положительным периодом ,то имеет место случай ![]() , в противном случае
, в противном случае ![]() .
.
4.1.1. Величина погрешности при этом равна
На первом участке (m=0) функция ![]() линейна
линейна  . При увеличении
. При увеличении ![]() ошибка усреднения
уменьшается.
ошибка усреднения
уменьшается.
Уравнение огибающей имеет вид

В реальных дальномерах величина ![]() , определяемая (3),
известна лишь приближенно. Поскольку неизвестна точно задержка сигнала
, определяемая (3),
известна лишь приближенно. Поскольку неизвестна точно задержка сигнала ![]() . Поэтому вместо ошибки
усреднения
. Поэтому вместо ошибки
усреднения ![]() удобно использовать её огибающую
удобно использовать её огибающую![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.