Из уравнения (8.3) видно, что точность измерения увеличивается с увеличением PRF. Однако, если р будет увеличена выше определенного значения, измерения дальности становятся неопределенными — приемник не сможет распознать, какой именно импульс вернулся. Поэтому, чтобы предотвратить неопределенность измерения дальности, вводится понятие неоднозначности по дальности:
|
|
(8.4) |
|
|
|
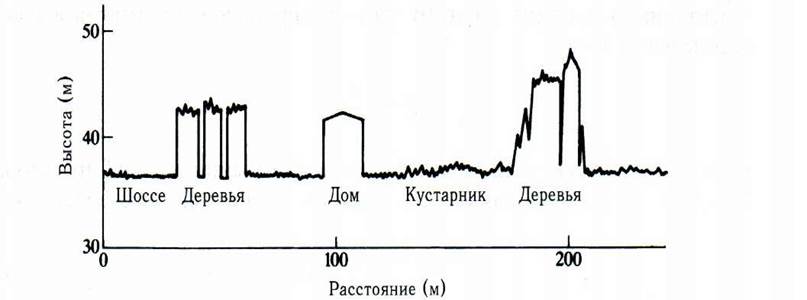
Рис. 8.4. Типичные выходные данные аэробортовой лазерной системы профилирования (полученные Джепски в 1985 г.). |
Отсюда должно быть Hamb > Н, или:
|
|
(8.5) |
Как правило, в аэробортовых системах определения дальности частота повторений не превышает десятков или сотен тысяч импульсов в секунду, а в космических бортовых системах определения дальности — несколько сотен импульсов в секунду.
Аэробортовые лазерные системы определения дальности используются в основном в топографической картографии. Их высокая точность определения дальности (порядка 0,1 м) позволяет применять результаты измерений в инженерных проектах. В качестве примера типичных измерений аэробортовой лазерной системы профилирования на рис. 8.4 представлены выходные данные одной из таких систем.
Первой лазерной системой профилирования, функционирующей в космосе, был прибор Balkan-1, разработанный для космической станции «Мир» (высота орбиты которой была 350 км) в 1995 г. Частота повторений импульсов этого прибора составляла 0,18 Гц, что позволяло применять интервал между импульсами в 45 км. Ширина области обзора равнялась 150 м, а разрешение — 3 м. Вскоре была разработана система, аналогичная GLAS, для спутника EOS-Laser Alt с высотой орбиты 700 км. В этой системе применялась частота повторений 40 Гц, ширина области обзора равнялась 200 м, а разрешение — 0,1 м.
8.2.1. Поправки на влияние атмосферы
Как указывалось выше, скорость распространения импульсов определяется групповой скоростью, которая меньше скорости распространения в вакууме с. При нормальных атмосферных условиях эта разница составляет 0,03 %, или для дальности 1000 м — 0,3 м. В прецизионных системах, кроме этой поправки, вносятся поправки на атмосферное давление, температуру и концентрацию паров воды.
Следует отметить, что параметры атмосферы (атмосферное давление, температура и концентрация паров воды) не являются постоянными вдольтраектории луча лазера. Поэтому время распространения импульса вдоль z определяется как:
где vg — групповая скорость как функция расстояния z' вдоль траектории. Вместо Tt удобней использовать показатель Р, который определяется как:
|
|
(8.6) |
|
|
(8.7) |
Показатель Р имеет размерность дальности и равен ошибке определения дальности в одном направлении.
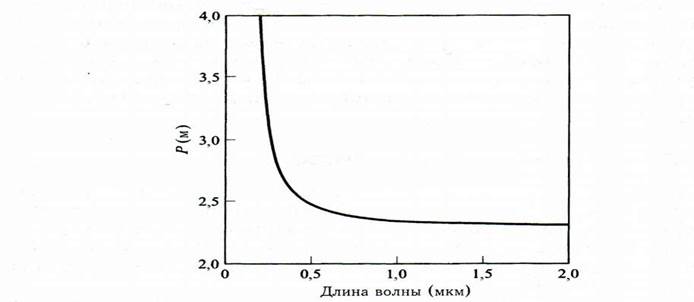
Показатель Р удобно использовать, так как он пропорционален интегралу плотности молекул вдоль траектории распространения лазерного луча. При определении поправок на влияние атмосферы предполагается, что атмосфера состоит из двух компонентов: сухой атмосферы и паров воды. Чтобы определить общее количество молекул в сухой атмосфере в вертикальном направлении, необходимо знать разницу атмосферных давлений в начале и конце траектории. На рис. 8.5 представлен график значений Р как функции длины волны, когда разница давлений равна стандартному атмосферному давлению 101325 Па. Для траекторий, которые проходят не полностью в атмосфере или которые составляют угол __________ к вертикали, значения Р на графике рис. 8.5 нужно умножить на коэффициент:

где _______________ — разница давлений между двумя концами траектории. Данный коэффициент можно применять для углов в не больше 75°.
|
|
|
Рис. 8.5. Задержка распространения лазерного луча в сухой среде. |
Для второго компонента атмосферы — паров воды суммарное количество молекул в вертикальном направлении выражается в толщине слоя воды, который бы получился при конденсации всех этих молекул.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.