СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
8.1. Введение
В главах 5—7 рассматривались пассивные системы, которые определяли существующие излучения. В данной главе и последующих главах будут обсуждаться активные системы, которые излучают определенные волны и анализируют сигнал, отраженный от поверхности Земли или атмосферы. Будут исследованы все три класса этих систем, выявлены различия между пассивными и активными системами и между системами, которые формируют изображение и которые этого не делают. Данная глава посвящена системам измерения дальности. Это типичные активные системы, принцип работы которых заключается в получении отраженного собственного сигнала и обработке его.
Так как системы измерения дальности являются более простыми системами, использующими рассеивающие свойства материалов, то в гл. 9 будут рассмотрены более сложные методы изучения поверхности Земли на основе эффекта рассеивания.
8.2. Лазерное профилирование
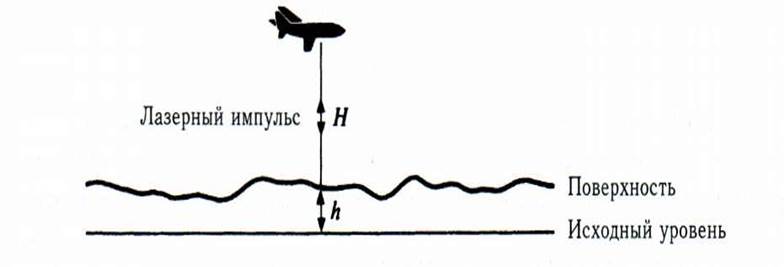
Лазерное профилирование, или лазерная альтиметрия, — это самое простое применение технологии лазерной локации. Короткий импульс «света» (в видимом или ближнем инфракрасном спектре) излучается в сторону исследуемой цели, и через некоторое время принимается его «эхо». Измерив время задержки и зная скорость распространения импульса, можно определить расстояние между системой и целью. При излучении непрерывного потока импульсов получается профиль цели.
|
|
|
Рис. 8.1. Принцип действия лазерной системы профилирования. |
|
|
|
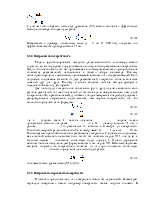
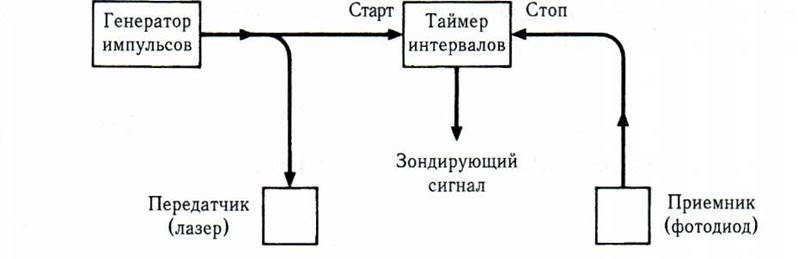
Рис. 8.2. Конструкция лазерной системы профилирования (схематично). |
Принцип действия лазерной системы профилирования и ее конструкция представлены на рис. 8.1 и 8.2 соответственно. Передатчиком является полупроводниковый лазер — обычно это Nd: YAG-лазер, работающий в диапазонах 0,53 мкм или 1,06 мкм, или GaAs-лазер, работающий в диапазоне 0,9 мкм. Это позволяет формировать короткие (порядка 1 не) и интенсивные импульсы с маленькой угловой шириной. Приемником является фотодиод (см. гл. 6). Таймер интервалов с разрешением порядка 1 не запускается сигналом от передатчика и останавливается сигналом от приемника. Время распространения импульса Tt равно:
|
|
(8.1) |
где Н — дальность, a vg — групповая скорость (см. п. 3.1.3) импульса. Как показано на рис. 3.4, групповая скорость распространения излучения видимого или ближнего инфракрасного диапазона в сухом воздухе отличается от скорости распространения в вакууме с на 0,03 %, что позволяет применить приближение ____________ в уравнении 8.1. Поправки на атмосферные эффекты будут рассмотрены в п. 8.2.1.
Замечательным
свойством лазерных систем профилирования являются высокое пространственное
разрешение и высокая точность определения дальности. Точность определения
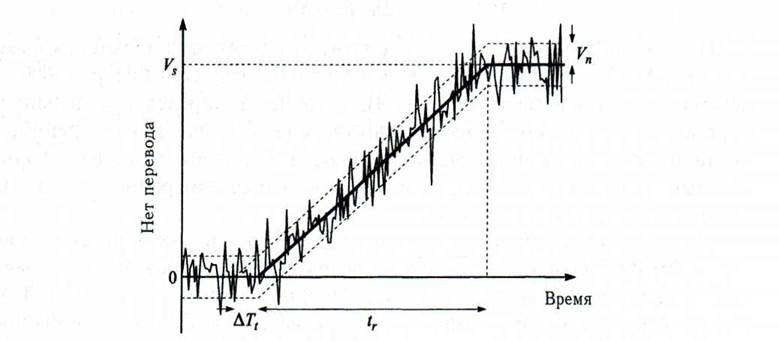
времени распространения импульса ![]() Tt зависит от времени нарастания импульса tr и
отношения сигнал/шум S. Данная зависимость продемонстрирована на рис. 8.3.
Tt зависит от времени нарастания импульса tr и
отношения сигнал/шум S. Данная зависимость продемонстрирована на рис. 8.3.
|
|
|
Рис. 8.3. Определение времени поступления импульса с шумом. Точность _____________, с которой импульс может быть распознан равна _______________ . |
Если амплитуда напряжения поступившего на приемник импульса V изменяется из-за шума, то отношение сигнал/шум определяется как:

Тогда точность, с которой импульс может быть распознан, равна:
|
|
(8.2) |
Типичный передатчик лазерных систем профилирования обладает временем нарастания импульса, в несколько наносекунд, а пришедший обратно импульс будет обладать несколько большим временем нарастания из-за неровностей поверхности, от которой он отражается. Отношение сигнал/ шум импульса на приемнике зависит от отражательной способности поверхности, дальности Н и параметров системы (например, мощности передатчика) и в меньшей степени зависит от погоды и атмосферного ослабления.
Если импульсы распространяются с частотой р (которая называется частотой повторения PRF), а скорость системы v, то интервал между импульсами будет равен v/p. Если угловая ширина луча системы ___________________, то линейный размер поверхности обзора этим лучом будет равен __________________. Этот размер не должен быть больше размера объекта. Кроме того, интервал v/p не должен быть меньше ________________. При определении дальности объекта, как правило, производятся несколько независимых измерений и определяется среднее значение, что повышает точность определения дальности. Количество независимых измерений N определяется как:
Точность определения дальности пропорциональна_________________:
|
|
(8.3) |
Например, типичная бортовая система определения дальности имеет tr= 5 нc, S= 1, v = 50 м/с, Н= 200 м и _________= 0,001 рад. При PRF р = 1000 c-1 можно сделать 4 измерения (N = 4), и точность определения дальности составляет ДН= 0,38 м. Конечно, если увеличить количество измерений, то увеличится точность определения дальности. Горизонтальное разрешение системы _____________ составляет 0,2 м, а при повторных измерениях его можно улучшить до 0,17 м.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.