Балтийский Государственный Технический Университет
имени Д.Ф. Устинова “Военмех”
Динамика системы вещественных точек и дифференциальные уравнения движения твердого тела
Преподаватель: Рупасова Н.Е
Студент: Ивкин А.Е
Группа: Н-151
Вариант: 3
Санкт - Петербург
2006
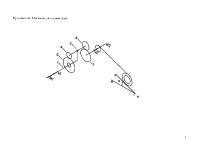
Задание: Для подъема груза вдоль наклонной плоскости KL, образующей угол α с горизонтом MN (Приложение 1) применяется механизм, схема которого изображена на рис. 2.
Рис. 2 Схема редуктора
Ведомый вал механизма 2 несет барабан для намотки троса. Ведущий вал механизма связан с ведомым валом с помощью редуктора, представляющего из себя систему шестерен.
К ведущему валу 1 со стороны двигателя приложен постоянный момент М1=1,2М0, где М0 величина момента, приложенного к ведущему валу, необходимого для удержания системы в покое.
Силы сопротивления, приложенные к механизму редуктора условно приведены к моменту М2, приложенному к ведомому валу 2, величина которого пропорциональна угловой скорости вала 2.
Груз катиться по плоскости без проскальзывания. Работой сил тяжести всех движущихся частей редуктора пренебрегаем. Остальные исходные данные сведены в таблицу 1.
Таблица 1. Исходные данные
|
Вес груза, Н |
10Р |
|
Коэффициент сопротивления, α2, Нмс |
0,3Ра |
|
Коэффициент трения качения «К» |
0,02а |
|
Радиус груза, м |
0,6а |
|
Радиус барабана, м |
0,3а |
|
Радиус инерции груза ρ, м |
0,4а |
|
Угол α, град |
20 |
|
Радиус шестерни, м: |
|
|
R3 |
а |
|
R4 |
0,3а |
|
R6 |
0,4a |
|
R7 |
0,6a |
|
Момент инерции шестерен относительно их осей вращения, кгм^2 |
|
|
I1 |
2Ра2/3g |
|
I2 (момент инерции вала 2 и барабана) |
8Ра2/g |
|
I46 |
Ра2/2g |
|
Масса шестерни 46, кг |
Р/g |
1. Определим зависимость угловых скоростей ведомых звеньев механизма редуктора, барабана от угловой скорости вращения ведущего вала 1.
1.1 Найдем скорость относительного движения шестерни 46:
![]()
1.2 Угловая скорость шестерни 46 определяется по формуле:
1.3 Найдем скорость относительного движения шестерни 6:
|
|
1.4 Угловая скорость шестерни 7 ведомого вала 2 и барабана определяется по формуле:
|
|
1.5 Скорость относительного движения шестерни барабана определим по формуле:
|
|
1.6 Скорость поступательного движения центра масс груза найдем по формуле:
|
|
1.7 Найдем угловую скорость груза:
|
|
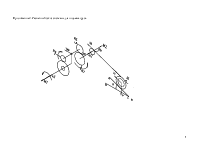
Направления скоростей и угловых скоростей приведены на рисунке в Приложении 2.
2. Найдем кинетическую энергию системы, как сумму энергий каждого тела входящего в эту систему.
![]()
где: Т1 - кинетическая энергия ведущего вала редуктора (кинетическая энергия вращательного движения), Т46 – кинетическая энергия шестерни 46 (плоскопараллельное движение), Т2 – кинетическая энергия ведомого вала и барабана (кинетическая энергия вращательного движения), Tload – кинетическая энергия груза, движущегося по наклонной плоскости (плоскопараллельное движение).
|
|
|
|
|
|
|
|
где: Iload – момент инерции груза относительно оси вращения.
![]()

![]()
Подставляя значения кинетических энергий в исходную формулу, получаем:
|
|
3. Определим элементарную работу всех сил, действующих на систему, выразив ее через элементарное перемещение ведущего вала.
![]()
где:
![]()
![]()
![]()
Получаем:
|
|
|
|
Подставляя значения, получим:
|
|
Учитывая что:
|
|
Подставляя окончательные результаты, получаем:
|
|
4. Найдем величину момента М0 приложенного к ведущему валу 1 и необходимого для удержания системы в покое.
Для этого приравняем элементарную работу всех сил к нолю, следовательно, система неподвижна, а значит и ω1=0.
Получаем значение М0:
|
|
Учитывая что вращающий момент, приложенный с валу равен М1=1,2М0 получаем:
|
|
Считая, что к ведущему валу приложен момент М1 получаем окончательное значение работы всех сил системы:
|
|
5. Запишем кинетическую энергию системы в дифференциальном виде:
|
|
Из условия: d’A=dT
получаем следующее:
|
|
поделив обе части уравнения на dt, получим следующее уравнение:
|
|
учитывая что: 
получим:
|
|
Записав данное уравнение в конечном виде, получаем дифференциальное уравнение движения ведущего вала 1:
|
|
6. Из условия, что в начальный момент времени система была неподвижна найдем зависимость угловой скорости вала 1 от времени, для этого проинтегрируем наше уравнение:
|
|
Для упрощения расчета условимся:
![]()
![]()
получаем:
|
|
интегрируем:
|
|
упростив полученное выражение, получаем:
|
|
Подставляя значения А, D, B найдем угловую скорость вращения вала 1 как функцию времени:
|
|
Примем значения P, a, g следующими:
![]()
![]()
![]()
Построим график зависимости угловой скорости от времени:
7. Из графика видно что скорость становиться постоянной примерно при 60 секундах и равняется 0,74 рад с-1
Приложение 1. Механизм для подъема груза.
Приложение 2. Расчетный эскиз системы для подъема груза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.