Гвоздева Ксения
Е-433
Лабораторная работа № 1.
Вариант 3-2
Структурный и кинематический анализ рычажного механизма.
Структурный анализ механизма.
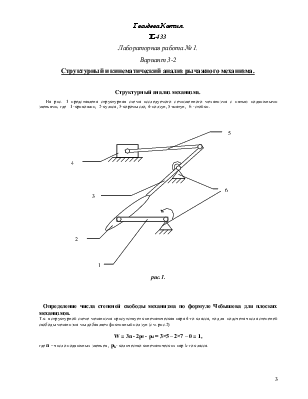
На рис. 1 представлена структурная схема исследуемого семизвенного механизма с пятью подвижными звеньями, где 1 -кривошип, 2-кулиса, 3-коромысло, 4-ползун, 5-шатун, 6 -стойки.
рис.1.
Определение числа степеней свободы механизма по формуле Чебышева для плоских механизмов.
Т.к. в структурной схеме механизма присутствует кинематическая пара 4-го класса, то для подсчета числа степеней свободы механизма мы добавляем фиктивный ползун (см. рис.2)
W = 3n - 2p5 - p4 = 3×5 – 2×7 – 0 = 1,
где n – число подвижных звеньев , pk- количество кинематических пар k-го класса.

Структурное деление механизма:
Входное звено – кривошип:
 рис.3.
рис.3.
W = 3×1 – 2×1 = 1
Структурные группы:
 W = 3×2 – 2×3 = 0
W = 3×2 – 2×3 = 0
рис.4(а).
 W = 3×2 – 2×3 = 0
W = 3×2 – 2×3 = 0
рис.4(б).
Кинематический анализ механизма.
Кинематический анализ производиться эксперементально-теоретичеси с использованием разложения в ряд МНК и ряд Фурье. Функцию положения F(φ) выходного штока в зависимости от угла поворота кривошипа 1 получаем экспериментально.
Полагая, что кривошип вращается равномерно с угловой скоростью ω=20 1/с, а, следовательно, φ=ω×t, получаем функцию положения от времени F(t) , её разлагаем в ряды МНК и Фурье, а дифференцированием рядов определяем зависимости для скорости и ускорения штока.
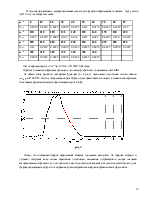
Таблица экспериментальной зависимости функции перемещения штока F(φ) с шагом ∆φ=20° по углу поворота кривошипа.
|
φ ° |
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
|
Ѕ, мм |
69 |
79,5 |
89 |
96 |
110 |
113,5 |
112,5 |
91,5 |
69 |
68 |
|
φ ° |
200 |
220 |
240 |
260 |
280 |
300 |
320 |
340 |
360 |
|
|
Ѕ, мм |
67,9 |
91 |
112,5 |
112 |
112 |
95,7 |
88 |
79 |
69 |
Шаг по времени при этом: ∆t = ∆φ ∕ω=20×π ∕ (50×180) = 0,007сек.
Обработку данных эксперимента проведем с помощью программного обеспечения для ПЭВМ.
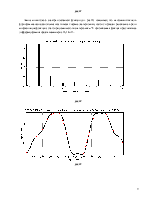
Разложим F(t) в ряд МНК с максимально возможным числом членов:n =nmax=18 и на основании анализа полученного амплитудного спектра (см. рис.5) определим рациональное число членов ряда величину nr. Варьируя числом членов ряда скорректируем величину nr и получим аппроксимацию дискретной функции перемещения штока (см. рис.6), и ее производные - скорость (см. рис. 7) и ускорение (см. рис. 8)
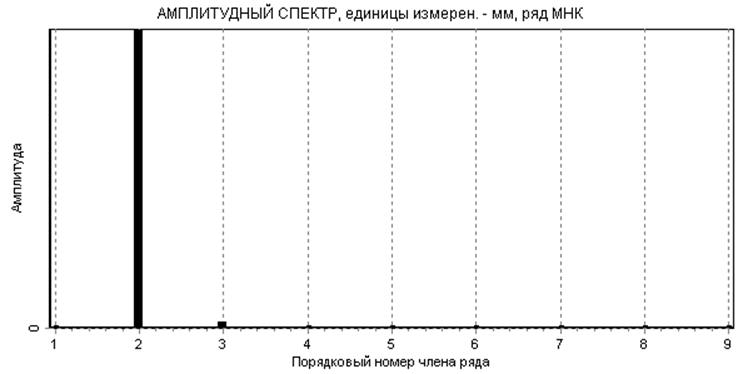
рис.5
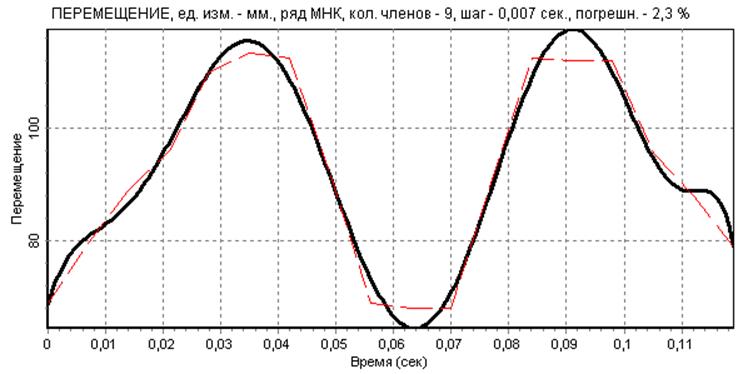
рис.6
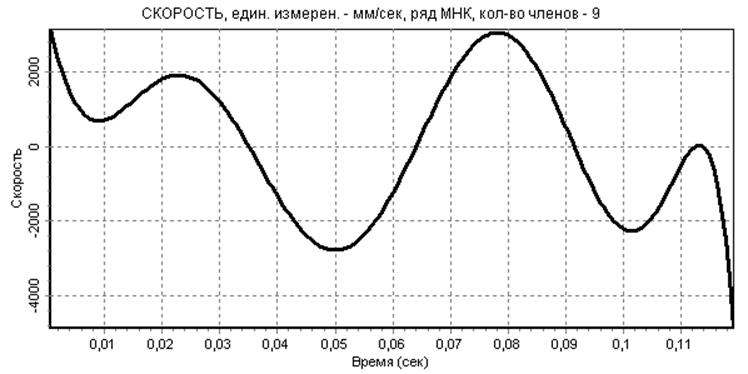
рис.7
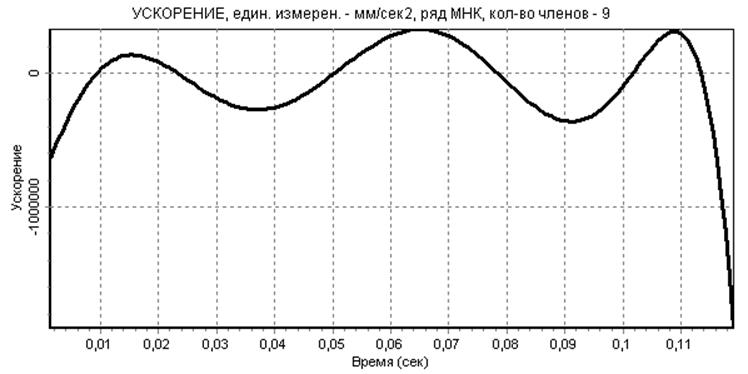
рис.8
Проведенный анализ полученных зависимостей,, показывает, что величина суммарной относительной погрешности аппроксимации функции является небольшой,. Сама полученная приближенная зависимость «похожа» на исходную, а сами аппроксимированные функции перемещения, скорости и ускорения являются гладкими.
Разложим F(t) в ряд Фурье с максимальновозможным числом гармоник: S=nmax=m/2=18/2=9 (рис.9).В этом случае значения ряда Фурье в узлах практически совпадают с данными эксперимента. Результаты дифференцирования полученной приближенной зависимости представлены на (рис.10) и (рис.11). На графике скорости и особенно ускорения явно видны паразитные осцилляции, вызванные погрешностями замера значений F(ti).
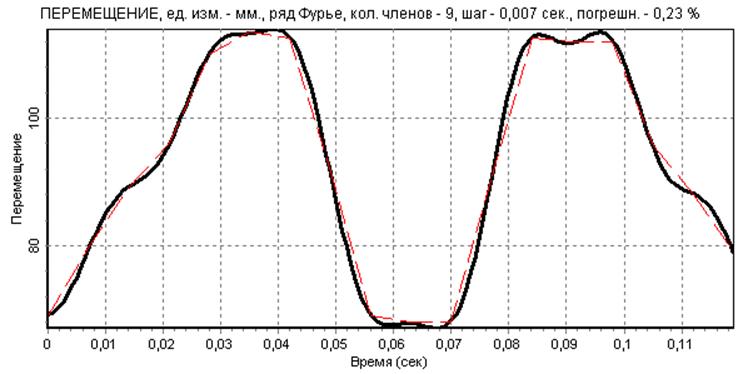
рис.9
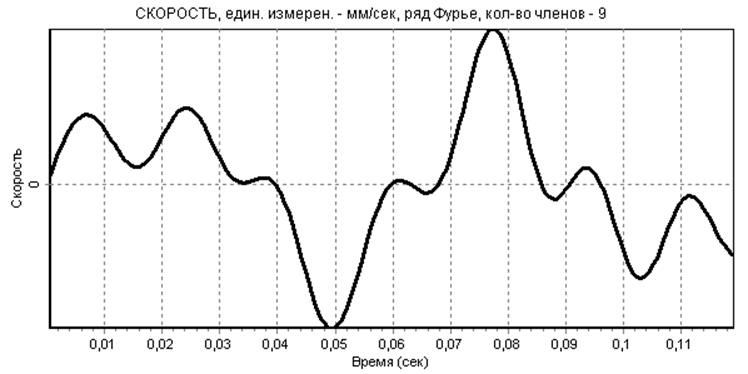
рис.10
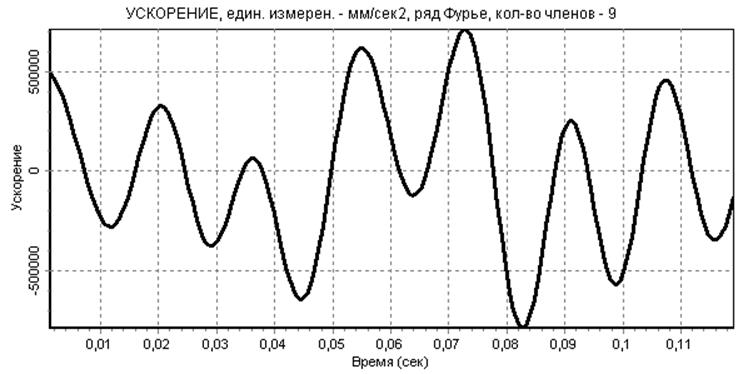
рис.11
Анализ амплитудного спектра полученной функции (см. рис.12) показывает, что наибольший вклад в формирование исследуемой зависимости вносят первые две гармоники, поэтому проведем разложение в ряд и аппроксимацию функции с учетом рационального числа гармоник nr=2. приближенная функция и результаты ее дифференцирования представлены на рис. 13, 14 и 15.
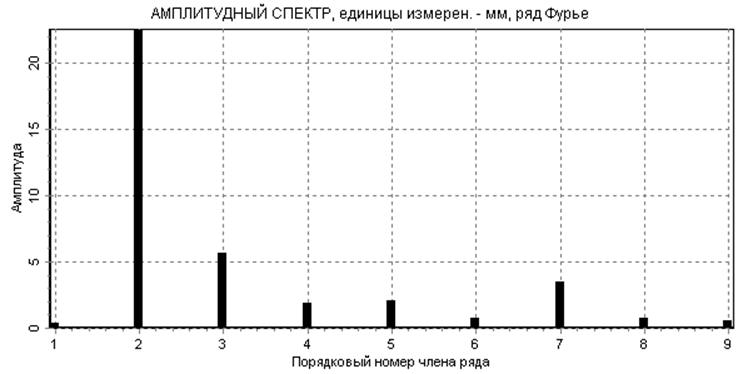
рис.12
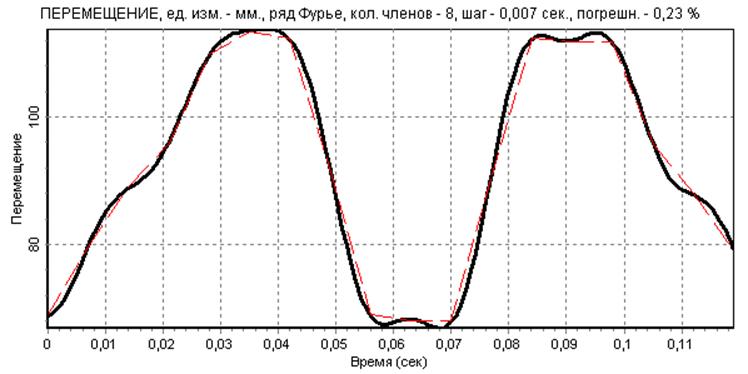
рис.13
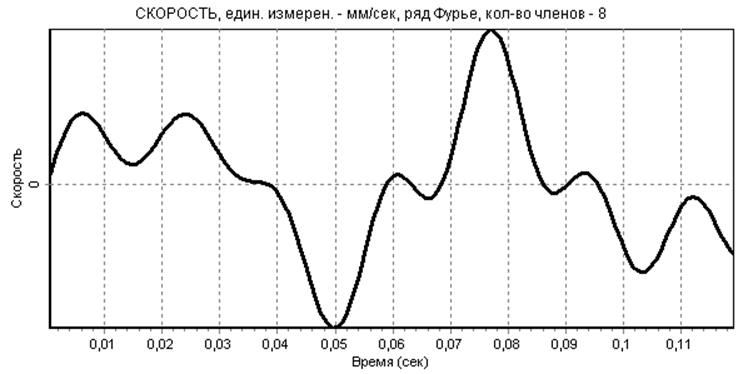
рис.14
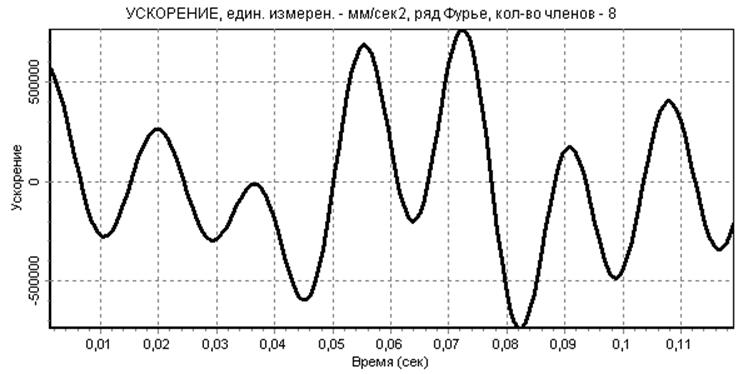
рис.15
Анализ итоговых зависимостей показывает, что величина суммарной относительной погрешности аппроксимации функции является небольшой, а сами аппроксимированные функции перемещения, скорости и ускорения являются гладкими.
Таким образом, ряды МНК и Фурье могут быть успешно применены для решения поставленных задач по аппроксимации заданной дискретной функции, ее сглаживанию и дифференцированию, а также снижению экспериментальных погрешностей.
Лабораторная работа № 2.
Вариант 6-7
Структурный и кинематический анализ кулачкового механизма.
Структурный анализ механизма.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.