На рис. 1 представлена структурная схема плоского кулачкового механизма с толкателем, силовым замыканием и роликовым контактом, где 1- кулачок, 2-толкатель, 3- ролик, Р - рабочий профиль, Ц- центровой профиль, R0-радиус базовой окружности, е- эксцентриситет,γ- угол давления.
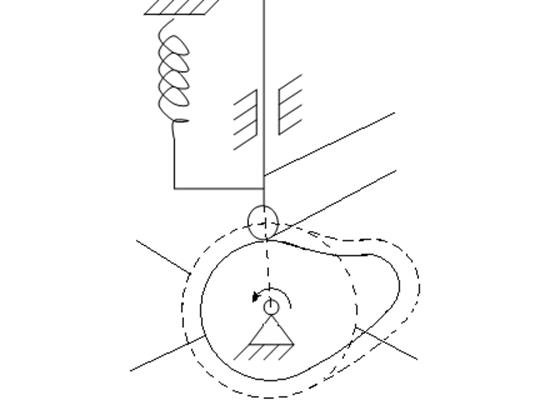
рис.1
Число степеней свободы механизма:
W = 3n - 2p5 - p4 = 3×2 – 2×2 – 1 = 1, где n – число подвижных звеньев , pk- количество кинематических пар k-го класса.
При вычислении числа степеней свободы ролик как пассивное звено и кинематические пары, им образованные, не учитываются.
Механизм имеет четыре фазы работы: удаление, дальний выстой, возврат и ближний выстой. Соответствующие конструктивные углы кулачка βу, βд, βв, βб, обозначены на (рис.1).
На рисунке также показан угол давления γ, измеряемый между вектором реакции R со стороны кулачка на толкатель и вектором скорости толкателя VT.
Кинематический анализ механизма.
Кинематический анализ производится экспериментально – теоретически с использованием разложения в ряд Фурье. Функцию положения F(φ) толкателя 2 в зависимости от угла поворота кулачка 1 получаем экспериментально.
Полагая, что кулачок вращается равномерно с угловой скоростью ω=50 1/с, получаем в функцию положения толкателя от времени F(t), разлагаем в ряд Фурье и дифференцированием ряда определяем зависимости для скорости и ускорения толкателя.
В таблице представлена экспериментальная зависимость функции перемещения толкателя F(φ) с шагом ∆φ=10° по углу поворота кулачка.
|
φ ° |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
Ѕ, м |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,011 |
0,0115 |
0,0285 |
0,0405 |
0,05 |
|
φ ° |
100 |
110 |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
190 |
|
Ѕ, м |
0,055 |
0,0555 |
0,0565 |
0,045 |
0,038 |
0,031 |
0,025 |
0,0205 |
0,016 |
0,0125 |
|
φ ° |
200 |
210 |
220 |
230 |
240 |
250 |
260 |
270 |
280 |
290 |
|
Ѕ, м |
0,01 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
|
φ ° |
300 |
310 |
320 |
330 |
340 |
350 |
360 |
|||
|
Ѕ, м |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
0,0095 |
Шаг по времени при этом: ∆t = ∆φ ∕ω=10×π ∕ (50×180) = 0,0035сек.
Обработку данных эксперимента проведем с помощью программного обеспечения для ПЭВМ.
На первом этапе разложим дискретную функцию F(t) в ряд с максимально возможным числом членов: s=nmax=m/2=36/2=18. В этом случае значения ряда Фурье в узлах практически совпадают с данными эксперимента. Полученные результаты расчетов представлены на рис. 2,3,4,5.
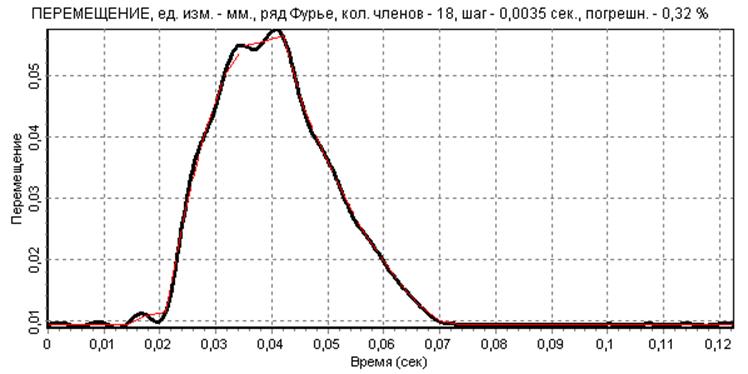
рис.2
Видно, что полученный график перемещения является однозначно негладким. На графике скорости и особенно ускорения явно видны паразитные осцилляции, вызванные погрешностями замера значений экспериментальной функции F(ti), что приводит к необходимости сглаживания этих зависимостей. Кроме того, на графике перемещения, скорости и ускорения неудовлетворительно аппроксимированы участки фаз выстоя.
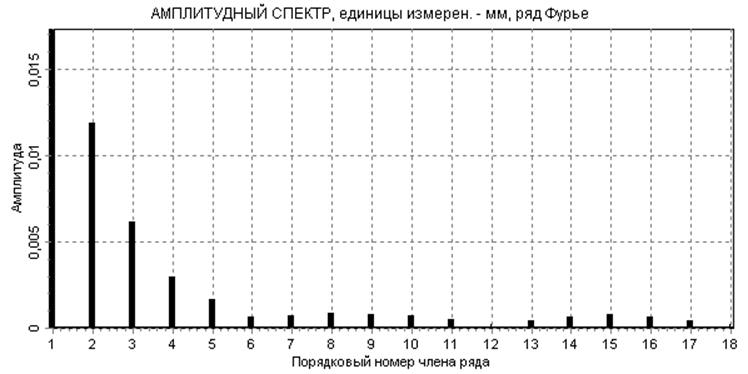
рис.3

рис.4
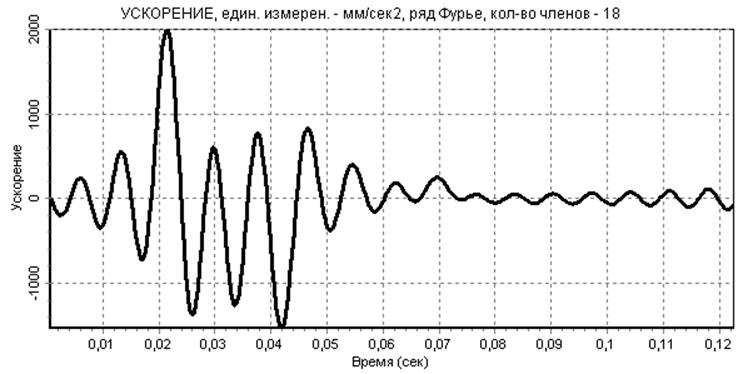
рис.5
Анализ амплитудного спектра функции (см. рис.3) показывает, что наибольший вклад в формирование приближенной зависимости, полученной с помощью ряда Фурье, вносят первые 5 гармоник, однако варьирование числом членов ряда показало, что наилучшие результаты (с точки зрения минимизации погрешности и «похожести» графика перемещения) достигаются при 17 членах ряда. На рис. 6,7,8 показаны результаты такой аппроксимации исходной дискретной функции перемещения и ее двукратного дифференцирования.
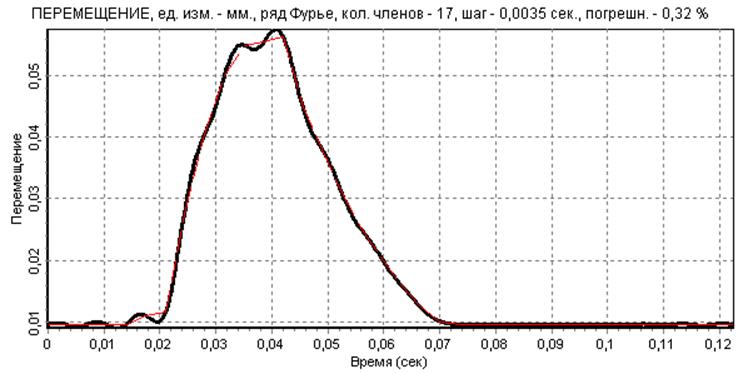
рис.6

рис.7
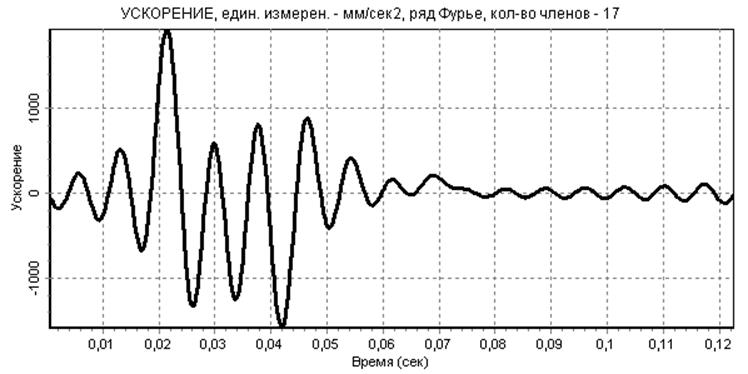
рис.8
Анализ представленных зависимостей показывает, что удалось несколько сгладить погрешности эксперимента. Функция удовлетворительно аппроксимирована лишь на фазах удаления и возврата, однако приемлемо аппроксимировать функцию и ее производные на фазах выстоя не удалось, на этих участках все равно наблюдаются осцилляции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.