![]() (9.3.12)
(9.3.12)
Из (9.3.12)
видно, что ось ![]() описывает в картинной
плоскости
описывает в картинной
плоскости ![]() окружность радиусом
окружность радиусом ![]() с центром в точке, определяемой
координатами
с центром в точке, определяемой
координатами ![]() (рис.3.2).
(рис.3.2).
Для дисперсий (учитываются только основные составляющие):

 .
(9.3.11)
.
(9.3.11)
Погрешности аналога вертикали
Проведем анализ погрешностей северного канала аналога вертикали БИИМ на ДУС с учетом их демпфирования по данным относительного лага и принятых ранее допущений. В этом случае его приближенную модель погрешностей представим в виде
![]()
где
 ,
,![]()
![]() ,
,
 (9.3.12)
(9.3.12)
Собственные значения матрицы ![]() (собственные
частоты системы) найдем из характеристического уравнения
(собственные
частоты системы) найдем из характеристического уравнения
![]() или
или ![]() (9.3.13)
(9.3.13)
где ![]()
Откуда
![]() (9.3.14)
(9.3.14)
Легко видеть, что при ![]() система (9.3.12)
обладает асимптотической устойчивостью. При этом при
система (9.3.12)
обладает асимптотической устойчивостью. При этом при ![]() переходный
процесс в системе будет апериодическим, а при
переходный
процесс в системе будет апериодическим, а при ![]() -
колебательным:
-
колебательным: ![]() с периодом
с периодом
 (9.3.15)
(9.3.15)
Переходная
матрица стационарной системы (9.3.12)
может быть найдена как обратное преобразование ![]() Лапласа
обратной матрицы
Лапласа
обратной матрицы ![]() (здесь s – оператор
Лапласа), т.е.
(здесь s – оператор
Лапласа), т.е.

(здесь 
![]() из
уравнения
из
уравнения ![]() )
)
Можно показать, что переходная матрица состояния системы при ![]() ,
, ![]() и при принятых допущениях будет
равна
и при принятых допущениях будет
равна
 (9.3.16)
(9.3.16)
Тогда в соответствии с решением вида (9.1.5) переходный процесс в
системе из-за ненулевых начальных условий при ![]() описывается
следующим образом:
описывается
следующим образом:
![]()

 (9.3.17)
(9.3.17)
при этом время переходного процесса приближенно будет равно
 (9.3.18)
(9.3.18)
Полагая, что входные возмущения ![]() в
проекциях на оси географической системы координат
в
проекциях на оси географической системы координат ![]() содержат
составляющие:
содержат
составляющие:
· детерминированные в одном пуске БИИМ:
- для дрейфов гироскопов и
погрешностей акселерометров (систематические и колебательные с частотами качки
и модуляционного вращения ИБ БИИМ для случая, когда ![]() )
)
 ,
(
,
(![]() );
);
- для погрешностей аналога ИСК (систематические и колебательные):
![]()
·
флуктуационные, аппроксимированные марковскими процессами первого
порядка с параметрами ![]() соответственно для дрейфов
гироскопов и погрешностей акселерометров (
соответственно для дрейфов
гироскопов и погрешностей акселерометров (![]() )
и белым шумом интенсивности
)
и белым шумом интенсивности ![]() для погрешностей
лага;
для погрешностей
лага;
·
а УОЛ и погрешности относительного лага представим в виде суммы
систематических составляющих соответственно ![]() (глобальные
и региональные составляющие УОЛ) и
(глобальные
и региональные составляющие УОЛ) и ![]() (инструментальные погрешности лага)
и флуктуационных
(инструментальные погрешности лага)
и флуктуационных ![]() (локальные изменения УОЛ)
и
(локальные изменения УОЛ)
и ![]() (флуктуации морских течений),
аппроксимируемых марковскими процессами первого порядка с параметрами
соответственно
(флуктуации морских течений),
аппроксимируемых марковскими процессами первого порядка с параметрами
соответственно ![]() и
и ![]() ;
;
для погрешностей аналога вертикали в установившемся режиме согласно решениям (9.1.5) и (9.1.9), получим следующие аналитические зависимости.
Для средних значений:

 (9.3.19)
(9.3.19)
где 
Для дисперсий:
 (9.3.20)
(9.3.20)
Выбор значения относительного коэффициента демпфирования ![]() осуществляется исходя из решения
оптимизационной задачи, при этом в качестве критерия качества используется для
ИНС морского применения обеспечение минимума дисперсий погрешностей в
установившемся режиме. Известно, что если преобладающее влияние на погрешности
аналога вертикали оказывают нестабильности дрейфов гироскопов, то оптимальное
значение
осуществляется исходя из решения
оптимизационной задачи, при этом в качестве критерия качества используется для
ИНС морского применения обеспечение минимума дисперсий погрешностей в
установившемся режиме. Известно, что если преобладающее влияние на погрешности
аналога вертикали оказывают нестабильности дрейфов гироскопов, то оптимальное
значение ![]() будет равно
будет равно
 при
при ![]()
если шумы акселерометров, то
 при
при ![]()
если локальные изменения УОЛ, то
 при
при ![]() (9.3.21)
(9.3.21)
Так при ![]() получим,
что
получим,
что ![]() .
.
Получив таким образом оценку погрешностей аналогов вертикали и ИСК и задавшись
значениями средних значений и ковариационных матриц вектора ![]() погрешностей измерения углового
положения измерительного блока БИИМ относительно объекта в соответствии с
соотношениями (9.1.7) и (9.1.10) приближенно можно оценить и уровень
погрешностей БИИМ на ДУС для автономного режима ее работы в выработке
навигационных параметров и параметров ориентации.
погрешностей измерения углового
положения измерительного блока БИИМ относительно объекта в соответствии с
соотношениями (9.1.7) и (9.1.10) приближенно можно оценить и уровень
погрешностей БИИМ на ДУС для автономного режима ее работы в выработке
навигационных параметров и параметров ориентации.
Подставляя аналитические решения (9.3.10) для погрешностей аналога ИСК и решения типа (9.3.19) для погрешностей аналога вертикали в известные (Л.8) кинематические соотношения
получим аналитические решения для погрешностей БИИМ в выработке навигационных параметров (координат места и курса).
9.4. Аналитические решения для погрешностей автономного режима работы БИИМ на конечном интервале времени
· По параметрам ориентации
При разложении в степенной ряд погрешностей ![]() БИИМ
в решении задачи ориентации для автономного режима работы на конечном интервале
времени
БИИМ
в решении задачи ориентации для автономного режима работы на конечном интервале
времени ![]() получим следующие приближенные
решения:
получим следующие приближенные
решения:
 ,
,
 ,
,
 , (9.4.1)
, (9.4.1)
где
![]() ,
, ![]() ,
,
![]() ;
;
· По навигационным параметрам
Можно показать, что при разложении в степенной ряд погрешностей ![]() ,
, ![]() БИИМ
для автономного режима ее работы в выработке плановых координат на конечном
интервале времени
БИИМ
для автономного режима ее работы в выработке плановых координат на конечном
интервале времени ![]() в соответствии с моделью
погрешностей БИИМ, ограничиваясь при этом полиномом третьего порядка, будем
иметь
в соответствии с моделью
погрешностей БИИМ, ограничиваясь при этом полиномом третьего порядка, будем
иметь

 (9.4.2)
(9.4.2)
 …;
…;
где ![]() ;
; ![]() -
погрешности начальных условий по параметрам ориентации и навигационным
параметрам, обусловленные погрешностями обсервационного режима работы ИСОН;
-
погрешности начальных условий по параметрам ориентации и навигационным
параметрам, обусловленные погрешностями обсервационного режима работы ИСОН; ![]() и
и ![]() -
соответственно систематические и флуктуационные составляющие погрешностей
акселерометров и гироскопов ИБ БИИМ.
-
соответственно систематические и флуктуационные составляющие погрешностей
акселерометров и гироскопов ИБ БИИМ.
Приложение
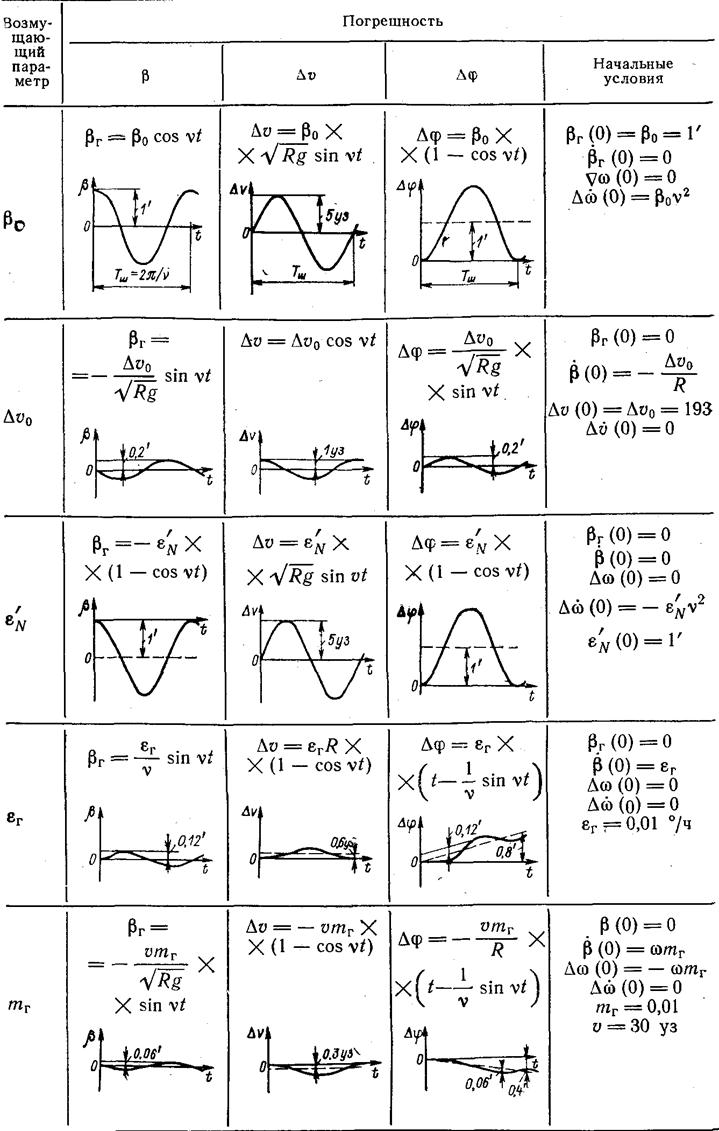
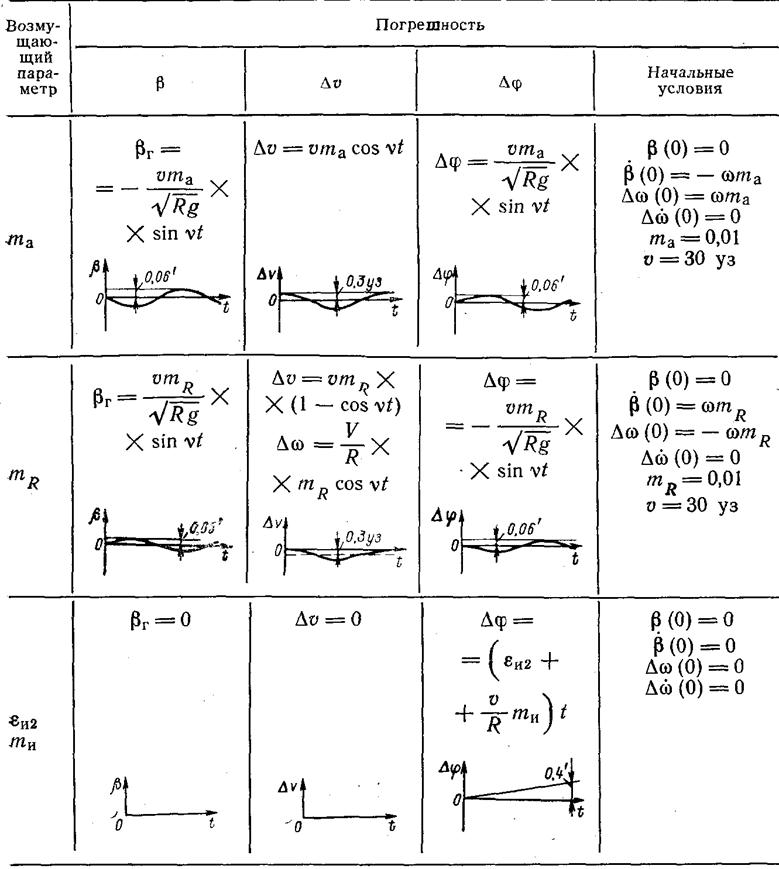
Графики процессов, протекающих в недемпфированном контуре вертикали ИИМ
В Табл.1[48] приведены результаты моделирования
погрешностей недемпфированного аналога вертикали ИИМ при ненулевых начальных
условиях (![]() ) и входных воздействиях ступенчатого
вида, где
) и входных воздействиях ступенчатого
вида, где
![]() ;
;
![]() -
смещение нулей соответственно акселерометра с первым интегратором, гироскопа и
второго интегратора;
-
смещение нулей соответственно акселерометра с первым интегратором, гироскопа и
второго интегратора;
![]() -
погрешности масштабов соответственно акселерометра, гироскопа, масштабирующего
множителя и второго интегратора.
-
погрешности масштабов соответственно акселерометра, гироскопа, масштабирующего
множителя и второго интегратора.
Примечание:
В первой строке Табл.1 кривая для ![]() справедлива при условии, что при
решении задачи начальной выставки инерциального контура БИНС (в задаче
ориентации) погрешность построения оси Мира в плоскости меридиана места
справедлива при условии, что при
решении задачи начальной выставки инерциального контура БИНС (в задаче
ориентации) погрешность построения оси Мира в плоскости меридиана места ![]() .
.
Табл.1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.