а0 > 0, ∆1 = а1 > 0,
∆2 = > 0
> 0
Третий (последний) определитель ∆3 = а3×∆2, что дает условие а3 > 0. Условие ∆2 > 0 при а0 > 0, а1 > 0 и а3 > 0 может выполняться только при а2 > 0.
Найдем значение определителей:
∆1 = а1 = 0,08 > 0
∆2
= = а1 ×а2 - а0
×а3 = 0,08×1 – 0,0007×20 = 0,066 >
0
а0 = 0,0007 > 0,
2.2 Исследование устойчивости с помощью критерия Михайлова
Критерий Михайлова – это частотный критерий, основанный на рассмотрении кривой, определяемой характеристическим уравнением замкнутой системы. Запишем характеристическое уравнение замкнутой системы, заменив оператор Лапласа на оператор Фурье:
![]()
Выделим действительную и мнимую составляющие:
![]()
![]()
С помощью MathCAD,
изменяя частоту от 0 до бесконечности, построим зависимость ![]() от
от ![]() (рисунок
2.1).
(рисунок
2.1).
По критерию Михайлова для того чтобы система была
устойчива необходимо, чтобы вектор, характеризующий замкнутую систему
регулирования, при изменении частоты описывал в положительном направлении (не
изменяя направления) угол ![]() (где n - степень характеристического уравнения).
(где n - степень характеристического уравнения).
Из рисунка наглядно видно, что вектор проходит последовательно в положительном направлении три квадранта (система третьего порядка) нигде не петлял и не обращаясь в ноль - следовательно, система устойчива.
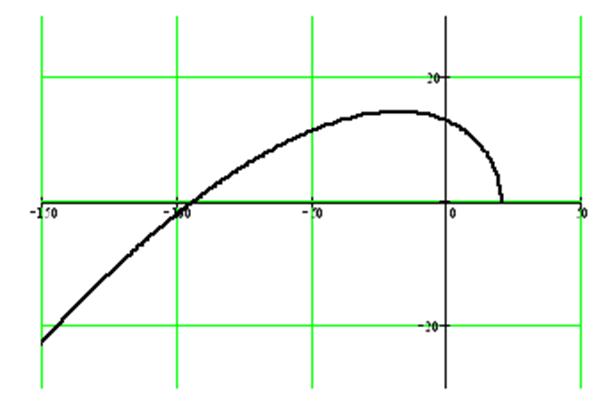
Рисунок 2.1 – Кривая Михайлова для характеристического уравнения третьего порядка
3. ПОСТРОЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Если на вход заданной системы подать синусоидальное воздействие Xвх(ω) = А(ω)×sinωt, то на ее выходе в установившемся режиме, будет
Xвых(ω) = А(ω)×sin(ωt + φ(ω)), (3.1)
Уравнение (3.1) – это амплитудно-фазовая частотная характеристика системы. Если заменить оператор Лапласа на оператор Фурье в выражении 1.2, то можно получить уравнение амплитудно-фазовой характеристика системы.
 .
.
Выделив в последнем выражении вещественную и мнимую часть, получим:
W(jω) = P(ω) + j × Q(ω),
Построение частотных характеристик осуществим с помощью прикладной программой Mathсad при изменении ω от 0 до ∞ (рисунки 3.1 – 3.3).
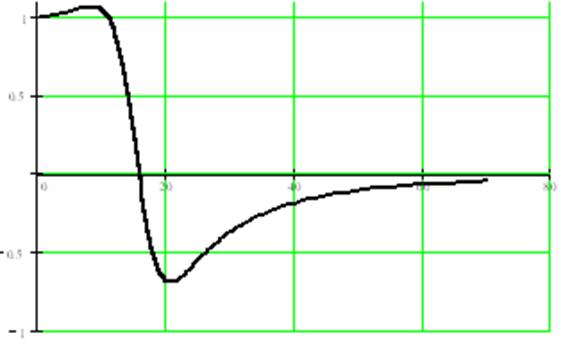
Рисунок 3.1 – Вещественная частотная характеристика
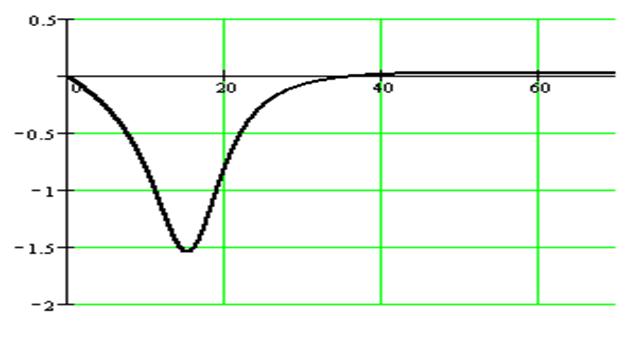
Рисунок 3.2 – Мнимая частотная характеристика
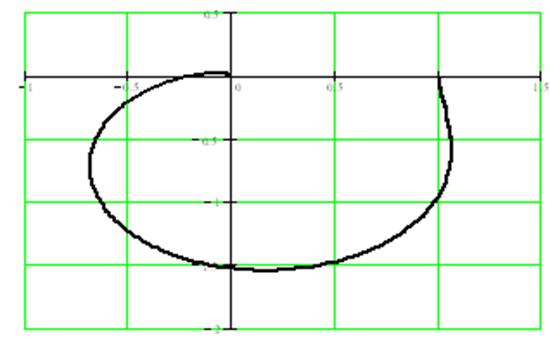
Рисунок 3.3 – Фазо - частотная характеристика
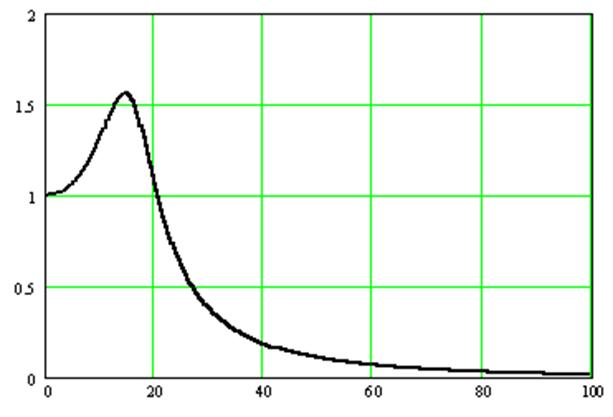
Рисунок 3.4 – Амплитудно – фазовая характеристика
W(jω) = A(ω) × φ(ω) = A(ω) × ejωt = P(ω) + j × Q(ω),
Таким образом, P(ω) = A(ω) × cos(ωt), а Q(ω) = A(ω) ×sin(ωt).
Также иногда производится запись амплитудно-фазовой характеристики в показательной форме:
W(jω) = A(ω) × ejωt,
A(ω) = ![]() =
=
 .
.
φ(ω) = arctg =
=
= arctg
Изменяя частоту ω от 0 до ∞ в выражениях (3.3) и (3.4) при помощи прикладной программы Mathcad строим характеристики системы, представленные на рисунках 3.4 и 3.5
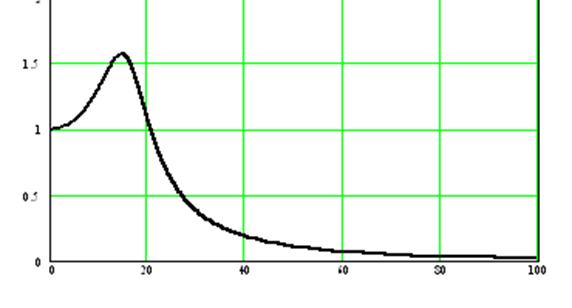
Рисунок 3.5 – Амплитудно-частотная характеристика
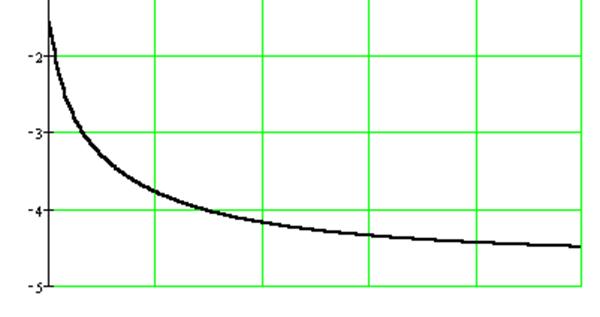
Рисунок 3.6 – Фазо-частотная характеристика
Для построения логарифмической амплитудно-частотной характеристики (рисунок 3.6) необходимо определить усиление амплитуды выходного сигнала по формуле:
L(ω) = 20lg KK1K2 – 20lg(ω) – 20lg![]() –
20lg
–
20lg![]() ,
,
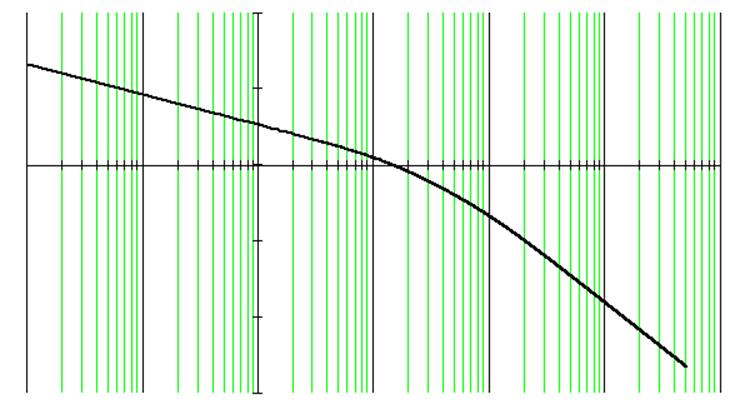
Рисунок 3.6 – Логарифмическая амплитудно-частотная характеристика
Для построения логарифмической фазо-частотной характеристики (рисунок 3.7) в полулогарифмическом масштабе по оси ординат откладываем фазу, вычисленную по формуле:
φ(ω) = -![]() - arctg(T1×ω)
- arctg(T2×ω).
- arctg(T1×ω)
- arctg(T2×ω).
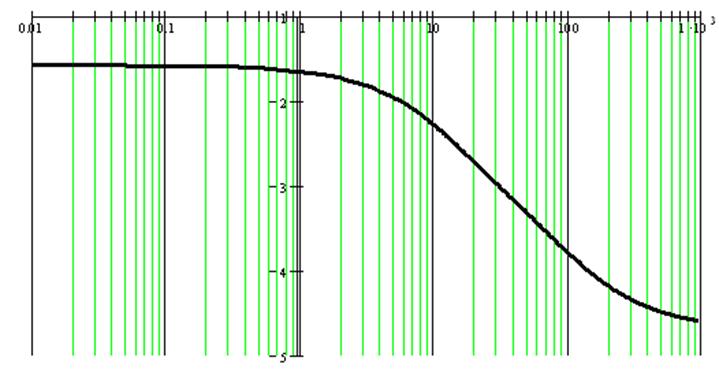
Рисунок 3.7 -Логарифмическая фазо-частотная характеристика
4 СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
4.1 Построение располагаемой ЛАХ
![]()
Под располагаемой ЛАХ понимается характеристика исходной системы регулирования Обычно под исходной системой понимается система, состоящая из регулируемого объекта и регулятора и не снабженная необходимыми корректирующими средствами, обеспечивающими требуемое качество регулирования.
По заданию имеем систему, состоящую из последовательно включенных интегрирующего и апериодического звеньев.
На основании передаточной функции разомкнутой системы для такой системы справедливо:
![]()
![]()
Найдем частотысопряжения:
ωc1 = ![]() =
= ![]() = 100 с-1; ωc2 =
= 100 с-1; ωc2 = ![]() =
=
 = 14.2 с-1.
= 14.2 с-1.
До первой частоты сопряжения будет действовать интегрирующее звено, что на рисунке соответствует наклонной -20 дБ/дек. На участке между частотами сопряжения имеем наклон -40 дБ/дек, третий участок ЛАЧХ имеет наклон -60дБ/дек. ЛАЧХ приведена на рисунке 4.1.
4.2 Построение желаемой ЛАХ
Построение желаемой ЛАХ производится в трёх областях (низкочастотной, среднечастотной и высокочастотной) по заданным показателям качества: величине
перерегулирования и времени регулирования:
![]()
![]()
Исследователями установлено, что при частоте среза наклон
ЛАЧХ должен быть - 20 дБ/дек, а частота ![]() определяется требуемым
временем переходного процесса и допустимым перерегулированием.
определяется требуемым
временем переходного процесса и допустимым перерегулированием.
Для определения ![]() воспользуемся
номограммой, представленной на рисунке 6.40(2)
воспользуемся
номограммой, представленной на рисунке 6.40(2)
![]()
По номограмме, указанной выше находим ![]() :
:
![]()
Зная ![]() можно
определить
можно
определить ![]() :
:
![]()
Запасы устойчивости по амплитуде и фазе можно определить с помощью номограммы на рисунке 6.41(2).
![]()
Желаемая ЛАХ приведена на рисунке 4.1
![]()
Рисунок 4.2 - Принципиальная схема корректирующего устройства
Согласно виду логарифмической характеристики запишем передаточную функцию:
Чтобы определить параметры схемы, один из них необходимо задать. Принимаем С=20 мкФ. Тогда

Найдем передаточную функцию скорректированного устройства:
Wрск(р) =  .
.
Построение переходного процесса скорректированной АСР проведем с помощью прикладной программы Mathcad. Полученная переходная характеристика скорректированной системы приведена на рисунке 4.3.
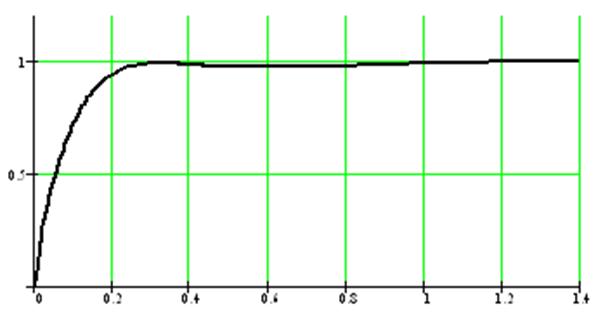
Рисунок 4.3 - Переходный процесс скорректированной АСР
Таким образом, последовательное корректирующее устройство улучшило
показатели качества. Получили: to = 0,25 и 
ЗАКЛЮЧЕНИЕ
В ходе данной курсовой работы были приобретены практические навыки по исследованию систем автоматического регулирования и их синтеза. Заданная система была проверена на устойчивость по критерию Михайлова.
Для этой системы рассчитали методом логарифмических частотных характеристик последовательное корректирующее устройство, которое должно обеспечивать:
to = 0,25 и
ПЕРЕЧЕНЬ ССЫЛОК
1. А.А. Иванов «Теория автоматического правления и регулирования» - М., Недра, 1970 г.-351с.
2. В.А. Бесекерский, Е.П. Попов «Теория систем автоматического регулирования» - М., Наука, 1975 г., 768 с.
3. Попов Е. П. «Теория линейных систем автоматического регулирования и управления» - М., Наука, 1989 г.-301с.
4. Теория автоматического управления и регулирования. /Под редакцией В.А. Нетушило/.- М., Наука, 1987 г., 400 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.