ВСТУП
Пневматичні системи управління (ПСУ) поряд з електричними і гідравлічними системами є одними з найбільш ефективних засобів автоматизації і механізації промислових процесів. Достатньо сказати, що в найбільш розвинутих країнах біля 30% всіх автоматичних процесів оснащено ПСУ.
Оснащення ПСУ машин й устаткування складає (від загального випуску): пакувальних машин до 90%; зварних та литих машин 70%; автоматичних маніпуляторів до 50%; вугледобувних машин більше 30% і т.д.
Переваги ПСУ чітко проявляються при механізації і автоматизації наступних масових операцій: затиску деталей, їх фіксації, складанні, контролі лінійних розмірів, транспортуванні, упаковці та інших, що дозволяє виключити або звести до мінімуму участь людини в тяжкій та монотонній праці, при цьому продуктивність праці на цих операціях виростає 1,5 - 4 рази.
Широкому застосуванню ПСУ в машинобудуванні допомагає їх відносна простота конструкції та експлуатаційного обслуговування, а це означає низьку ціну та швидке повернення затрат; надійність роботи в широкому діапазоні температур, високої вологості та запиленості повітря; пожежо- та вибухобезпеки; довгий строк служби та швидкість переміщення вихідної ланки пневматичних виконуючих пристроїв, легкість отримання і відносна простота передачі стислого повітря, можливість постачання ним великої кількості користувачів від одного джерела.
До недоліків ПСУ слід віднести малу швидкість передачі сигналу на великі відстані, складність забезпечення плавного переміщення робочих органів пневматичних виконавчих пристроїв при коливаннях навантаження і відносно високу собівартість енергоносія (стислого повітря).
В машинобудуванні використовують системи, реалізовані на пневматичній техніці трьох рівнів тиску: високого 0,2-1,6 МПа, середнього, 0,1-0,25 МПа та низького 0,001– 0,01 МПа.
1. ВИХІДНІ ДАНІ
Варіант: В4-14
Цикл
роботи системи: ![]()
Схема:
Рис.1. Схема розміщення приводів
Вид керування: путьове, окрім ходу вперед приводу 1, який контролюється за тиском.
Таблиця 1.
|
рМ, МПа |
s, м |
m1, кг |
Р2, кН |
Р0, кН |
|
lТ1, м |
lТ2, м |
tОЧ, с |
|
0,5 |
0,125 |
8 |
5,6 |
0,25 |
0,015 |
12 |
0,8 |
1,5 |
рМ - абсолютний тиск повітря, що підводиться;
s - довжина робочого ходу приводу;
m1 - маса рухомих частин приводу (крім вантаж, що переміщується);
Р2 - технологічне зусилля (корисне навантаження);
Р0 – зусилля попереднього стиснутої зворотної пружини;
 - відносна величина шкідливого обсягу
робочої порожнини власне пневмоциліндра або мембранної камери без врахування
об'єму пневмолінії, що зв'язує порожнину з пневморозподільником; для приводів
двостороннього впливу шкідливий об'єми приймати однаковими для робочої і
вихлопної порожнини;
- відносна величина шкідливого обсягу
робочої порожнини власне пневмоциліндра або мембранної камери без врахування
об'єму пневмолінії, що зв'язує порожнину з пневморозподільником; для приводів
двостороннього впливу шкідливий об'єми приймати однаковими для робочої і
вихлопної порожнини;
lТ1 - довжина трубопроводу від пневморозподільника до точки підводу живлення з магістралі стиснутого повітря;
lТ2 - довжина трубопроводу від розподільника основного приводу до його робочої порожнини; для приводів двосторонньої дії довжину пневмолінії вихлопу приймати такою ж;
tОЧ - очікуваний час спрацювання основного приводу (використовується для визначення умовних проходів приєднувальних отворів пневмоциліндрів і мембранних камер, а також для порівняння з розрахунковим часом спрацювання при аналізі динаміки основного приводу).
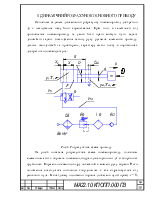
2. РОЗРОБКА ПНЕВМАТИЧНОЇ СХЕМИ
На рис.2 зображена
пневматична схема, яка забезпечує автоматичну роботу 3-х пневмоциліндрів за
циклом ![]() .
.
 Рис.2. Пневматична схема системи
Рис.2. Пневматична схема системи
На схемі поршні пневмоциліндрів Ц1, Ц2, та Ц3 знаходяться у вихідному положенні. Кулачки, що встановлені на їх штоках, впливають на пневморозподільники Р4, Р6 та Р8, на виходах яких утворюються командні сигнали. Сигнал з виходу Р6 підведений у ліву порожнину управління розподільника Р1, утримуючи його в переключеному вправо положенні. Сигнал від Р4 перерваний пусковим розподільником Р9.
При короткочасному включенні розподільника Р9, сигнал поступає у праву порожнину управління розподільника Р2 і переключає його в праве положення. Переключення можливе, так як ліва порожнина управління розподільника пов'язана при цьому з атмосферою через пневмоклапан послідовності КП1. Послідуюче вимикання Р9 знову перериває подачу командного сигналу, а права порожнина розподільника Р2 поєднується з атмосферою. Однак, розподільник Р2 залишається в переключеному положенні, механічно його запам'ятовуючи, і поршень циліндра Ц2 починає прямий хід. На початку руху вимикається Р6. що підготовлює розподільник Р1 до послідуючого переключення уліво. Перемикаючий сигнал утворюється на виході Р5, який контролює виконання прямого ходу циліндра Ц3. По закінченню прямого хода вмикається розподільник Р7, який в свою чергу перемикає розподільник Р1 у праве положення, що викликає прямий хід поршня Ц1. В кінці цього ходу починає рости тиск в поршневій порожнині циліндра Ц1, спрацьовує пневмоклапан послідовності, переключаючи Р2 у ліве положення. Виконується зворотній хід Ц2. В кінці ходу спрацьовує Р6, йде сигнал на ліву порожнину Р1 та ліву порожнину Р3 - перемикає їх у ліве положення. Виконується зворотній хід Ц1 та Ц3. Штоки циліндрів Ц1 та Ц3 втягуються одночасно. У кінці ходу натискується Р4 та Р8, які одночасно подають сигнал на Р9. Цикл перерваний розподільником Р9.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.