5 ЛАБОРАТОРНАЯ РАБОТА №5. ИССЛЕДОВАНИЕ ТОЧНОСТИ ЗАМКНУТЫХ САУ В УСТАНОВИВШИХСЯ РЕЖИМАХ
5.1 Цель работы
Исследовать влияние структуры звеньев САУ и типа внешнего воздействия на величину ошибки в установившемся режиме.
5.2 Краткие теоретические сведения
Назначение автоматической системы управления – изменение выходной величины Х(t) в соответствии с изменением задающего воздействия Хз(t) при любых изменениях задающего и возмущающего воздействий. Точность системы в установившемся режиме зависит как от вида воздействия создающего ошибку, так и от структуры и параметров САУ, т.е. от ее математического описания Фε(s). Качество регулирования системы в установившемся режиме характеризуется значениями коэффициентов ошибок.
Точность САУ при
гармоническом воздействии оценивают по значению ![]() -
модуля КФЧХ замкнутой системы по ошибке относительно соответствующего внешнего
воздействия, равного отношению амплитуды сигнала ошибки ΔХm(ω) к амплитуде
внешнего воздействия А1(ω) вызвавшего ошибку
-
модуля КФЧХ замкнутой системы по ошибке относительно соответствующего внешнего
воздействия, равного отношению амплитуды сигнала ошибки ΔХm(ω) к амплитуде
внешнего воздействия А1(ω) вызвавшего ошибку
 .
.
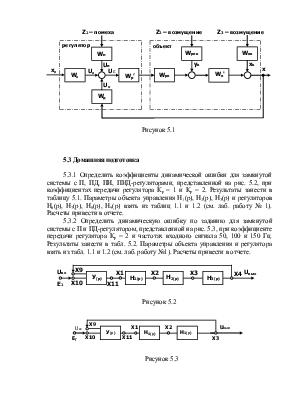
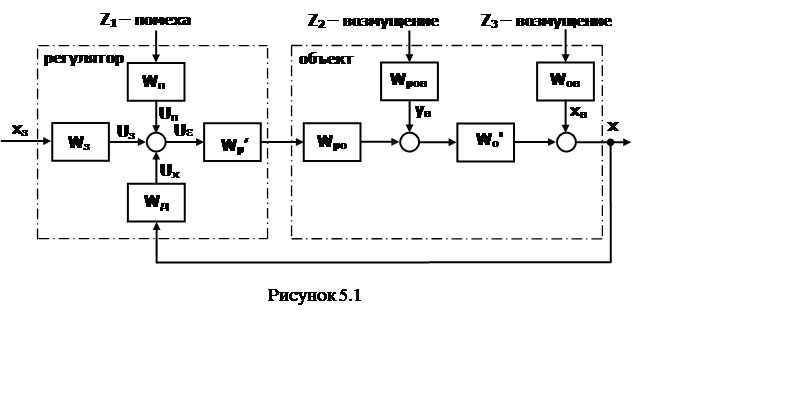
Согласно принципа суперпозиции, ошибка системы складывается из нескольких составляющих. Так, например, для системы, представленной на рис. 5.1, ошибка состоит из четырех составляющих
ε = εз + εв + εп + εх ,
где εз – составляющая, обусловленная неточным воспроизведением системой задания Хз на выходе объекта;
εв, εп, εх – составляющие, обусловленные неполной компенсацией регулятором возмущений Yв, Хв и помехи Хп на управляемую величину Х. Причем каждая составляющая пропорциональна величине воздействия, создавшего ее.
5.3 Домашняя подготовка
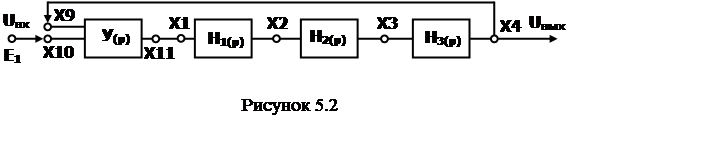
5.3.1 Определить коэффициенты динамической ошибки для замкнутой системы с П, ПД, ПИ, ПИД-регуляторами, представленной на рис. 5.2, при коэффициентах передачи регулятора Кр = 1 и Кр = 2. Результаты занести в таблицу 5.1. Параметры объекта управления Н1(р), Н2(р), Н3(р) и регуляторов Н6(р), Н7(р), Н8(р), Н9(р) взять из таблиц 1.1 и 1.2 (см. лаб. работу № 1). Расчеты привести в отчете.
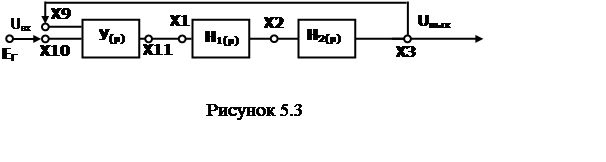
5.3.2 Определить динамическую ошибку по заданию для замкнутой системы с П и ПД-регулятором, представленной на рис. 5.3, при коэффициенте передачи регулятора Кр = 2 и частотах входного сигнала 50, 100 и 150 Гц. Результаты занести в табл. 5.2. Параметры объекта управления и регулятора взять из табл. 1.1 и 1.2 (см. лаб. работу №1). Расчеты привести в отчете.
 |
|||
 |
|||
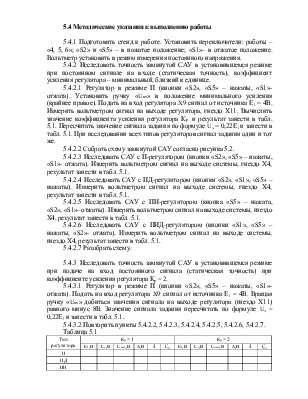
5.4 Методические указания к выполнению работы
5.4.1 Подготовить стенд к работе. Установить переключатели: работы – «4, 5, 6»; «S2» и «S5» – в нажатое положение; «S1»– в отжатое положение. Вольтметр установить в режим измерения постоянного напряжения.
5.4.2 Исследовать точность замкнутой САУ в установившемся режиме при постоянном сигнале на входе (статическая точность), коэффициент усиления регулятора – минимальный, близкий к единице.
5.4.2.1 Регулятор в режиме П (кнопки «S2», «S5» – нажаты, «S1»- отжата). Установить ручку «Uвх» в положение минимального усиления (крайнее правое). Подать на вход регулятора X9 сигнал от источника Е1 = 4В. Измерить вольтметром сигнал на выходе регулятора, гнездо Х11. Вычислить значение коэффициента усиления регулятора Кр и результат занести в табл. 5.1. Пересчитать значение сигнала задания по формуле Uз = 0,22Е1 и занести в табл. 5.1. При исследовании всех типов регуляторов сигнал задания один и тот же.
5.4.2.2 Собрать схему замкнутой САУ согласно рисунка 5.2.
5.4.2.3 Исследовать САУ с П-регулятором (кнопки «S2», «S5» – нажаты, «S1»- отжата). Измерить вольтметром сигнал на выходе системы, гнездо Х4, результат занести в табл. 5.1.
5.4.2.4 Исследовать САУ с ПД-регулятором (кнопки «S2», «S1», «S5» – нажаты). Измерить вольтметром сигнал на выходе системы, гнездо Х4, результат занести в табл. 5.1.
5.4.2.5 Исследовать САУ с ПИ-регулятором (кнопка «S5» – нажата, «S2», «S1»- отжаты). Измерить вольтметром сигнал на выходе системы, гнездо Х4, результат занести в табл. 5.1.
5.4.2.6 Исследовать САУ с ПИД-регулятором (кнопки «S1», «S5» – нажаты, «S2»- отжата). Измерить вольтметром сигнал на выходе системы, гнездо Х4, результат занести в табл. 5.1.
5.4.2.7 Разобрать схему.
5.4.3 Исследовать точность замкнутой САУ в установившемся режиме при подаче на вход постоянного сигнала (статическая точность) при коэффициенте усиления регулятора Кр = 2.
5.4.3.1 Регулятор в режиме П (кнопки «S2», «S5» – нажаты, «S1»- отжата). Подать на вход регулятора X9 сигнал от источника Е1 = 4В. Вращая ручку «Uвх» добиться значения сигнала на выходе регулятора (гнездо Х11) равного минус 8В. Значение сигнала задания пересчитать по формуле Uз = 0,22Е1 и занести в табл. 5.1.
5.4.3.2 Повторить пункты 5.4.2.2, 5.4.2.3, 5.4.2.4, 5.4.2.5, 5.4.2.6, 5.4.2.7.
|
Тип регулятора |
Кр = 1 |
Кр = 2 |
||||||||||
|
Е1,В |
Uз,В |
Uвых,В |
Δ,В |
δ |
Со |
Е1,В |
Uз,В |
Uвых,В |
Δ,В |
δ |
Со |
|
|
П |
||||||||||||
|
ПД |
||||||||||||
|
ПИ |
||||||||||||
|
ПИД |
||||||||||||
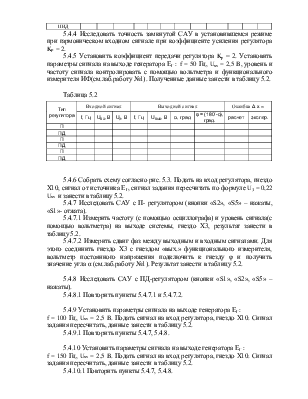
5.4.4 Исследовать точность замкнутой САУ в установившемся режиме при гармоническом входном сигнале при коэффициенте усиления регулятора KР = 2.
5.4.5 Установить коэффициент передачи регулятора Kр = 2. Установить параметры сигнала на выходе генератора ЕГ : f = 50 Гц, Uвх = 2,5 B, уровень и частоту сигнала контролировать с помощью вольтметра и функционального измерителя ИФ(см.лаб.работу №1). Полученные данные занести в таблицу 5.2.
|
Тип регулятора |
Входной сигнал |
Выходной сигнал |
Ошибка Δ х m |
||||||
|
f, Гц |
UВХ, В |
UЗ, В |
f, Гц |
UВЫХ, В |
α, град |
φ = (180˚-α), град. |
расчет |
экспер. |
|
|
П |
|||||||||
|
ПД |
|||||||||
|
П |
|||||||||
|
ПД |
|||||||||
|
П |
|||||||||
|
ПД |
|||||||||
5.4.6 Собрать схему согласно рис. 5.3. Подать на вход регулятора, гнездо Х10, сигнал от источника ЕГ, сигнал задания пересчитать по формуле UЗ = 0,22 Uвх и занести в таблицу 5.2.
5.4.7 Исследовать САУ с П- регулятором (кнопки «S2», «S5» – нажаты, «S1»- отжата).
5.4.7.1 Измерить частоту (с помощью осциллографа) и уровень сигнала(с помощью вольтметра) на выходе системы, гнездо Х3, результат занести в таблицу 5.2.
5.4.7.2 Измерить сдвиг фаз между выходным и входным сигналами. Для этого соединить гнездо Х3 с гнездом «вых.» функционального измерителя, вольтметр постоянного напряжения подключить к гнезду φ и получить значение угла α (см.лаб.работу №1). Результат занести в таблицу 5.2.
5.4.8 Исследовать САУ с ПД-регулятором (кнопки «S1», «S2», «S5» – нажаты).
5.4.8.1 Повторить пункты 5.4.7.1 и 5.4.7.2.
5.4.9 Установить параметры сигнала на выходе генератора ЕГ :
f = 100 Гц, Uвх = 2,5 B. Подать сигнал на вход регулятора, гнездо Х10. Сигнал задания пересчитать, данные занести в таблицу 5.2.
5.4.9.1 Повторить пункты 5.4.7, 5.4.8.
5.4.10 Установить параметры сигнала на выходе генератора ЕГ :
f = 150 Гц, Uвх = 2,5 B. Подать сигнал на вход регулятора, гнездо Х10. Сигнал задания пересчитать, данные занести в таблицу 5.2.
5.4.10.1 Повторить пункты 5.4.7, 5.4.8.
5.5 Обработка результатов
5.5.1 По
результатам эксперимента, табл.5.1, рассчитать абсолютную Δ=![]() -
- ![]() и
относительную δ = Δ/Uз погрешности.
Сравнить их со значениями Со.
и
относительную δ = Δ/Uз погрешности.
Сравнить их со значениями Со.
5.5.2 По результатам эксперимента, табл. 5.2 определить значение ошибки ΔХm = Uεm по выражению Uε = Uз – Uвых . Для упрощения расчета значения Uз и Uвых целесообразно представить в комплексной форме Uз = Uз еjtЗ ; Uвых = Uвых еjtВЫХ . Результаты расчетов занести в таблицу.
5.5.3 Построить временные диаграммы входного и выходного сигналов, а также сигнала ошибки (для одного из случаев, приведенных в табл. 5.2, по указанию преподавателя).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.