Лабораторная работа №7
Вариант №9
Цели работы:
- изучить форматы операторов программирования;
- изучить технологию разработки программ в среде MathCAD;
- разработать пользовательские программы в среде MathCAD;
Задание №1.
Выполнить примеры в методичке и изучить влияние исходных данных на результаты моделирования. Сделать выводы.
Пример №1
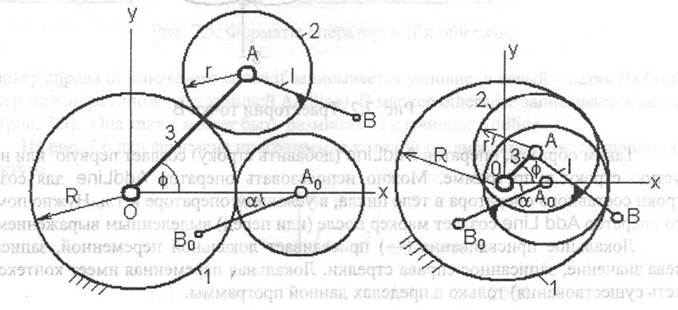
На рисунке приведена расчетная схема эпи- и гипоциклоидных механизмов. Через R и r обозначены радиусы центрального колеса и сателлита соответственно, размер стержня АВ=I. Тогда проекции точки В стержня на оси х и у декартовой системы координат (в виде вектора X) будут иметь вид:
|
|
|
|
Проекции точки В выражены в долях радиуса R центрального колеса:
|
|
|
|
|
|
|
|
Знаки «+» и «-» заменены константой к = +1 для внешнего и k = -1 для внутреннего зацепления.
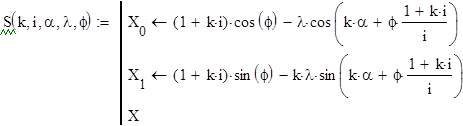
Пусть имя программы S, в круглых скобках указаны передаваемые программе формальные аргументы. Кнопкой Addline созданы три строки программы, в которые записаны:
|
|
|
|
|
|
|
|
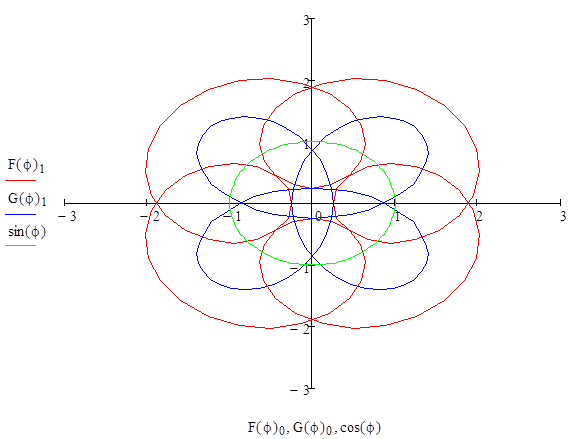
Программа S вызывается функциями F(φ) для эпициклоидных и G(φ) для гипоциклоидных механизмов.
|
|
Пример №2
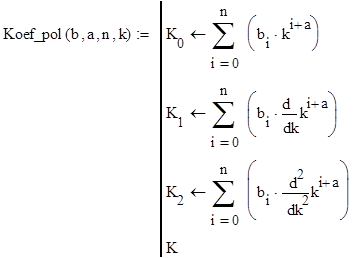
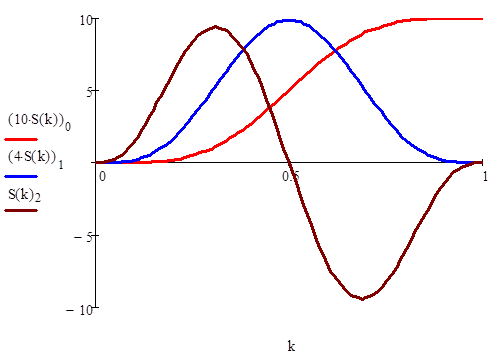
Выполним формирование закона движения толкателя кулачкового механизма с использованием функции Koef_pol( ), реализующего расчёт кинематических коэффициентов. Известно, что при синтезе кулачковых механизмов с упругим толкателем обычно подбирают такие законы его движения, при которых отсутствуют жёсткие удары. В этом случае целесообразно использовать полином седьмой степени с коэффициентами, записанными в виде вектора b. Создадим линейную программу Koef_pol( ) расчёта коэффициентов перемещения ς(k), скорости δ(k), и ускорения ξ(k), в которой:
- коэффициент перемещения ς(k) моделируется переменной![]() ;
;
- коэффициент скорости δ(k) моделируется переменной![]() ;
;
- коэффициент перемещения ξ(k) моделируется переменной![]() ;
;
Таким образом, каждый элемент возвращаемого вектора К моделирует соответствующий кинематический коэффициент. В качестве входных параметров полинома задаётся вектор коэффициентов b, постоянный параметр сдвига степени полинома a, число компонентов полинома n и переменная полинома k.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример №3
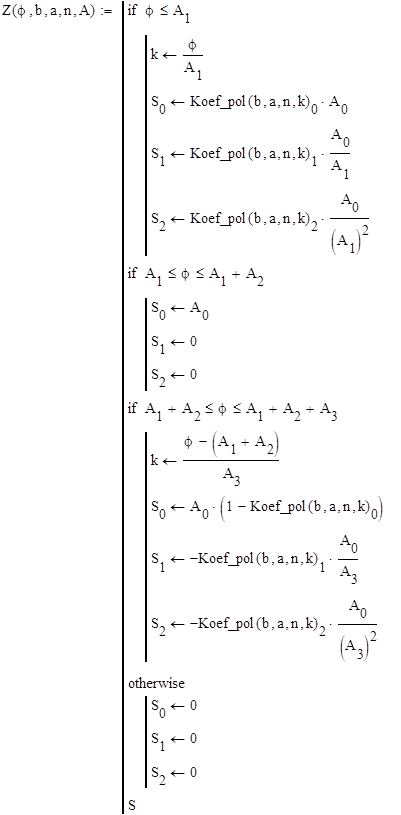
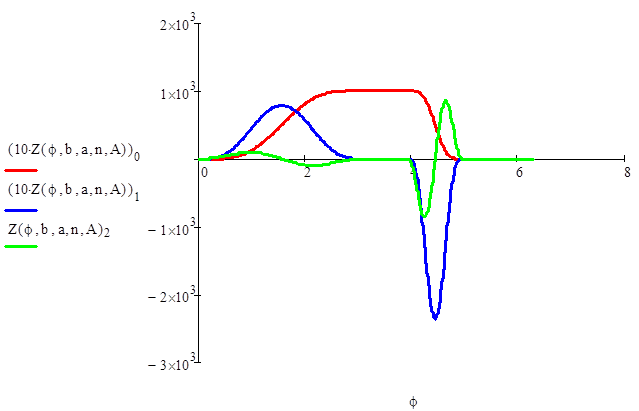
Для формирования закона движения толкателя кулачкового механизма введём обозначения:
Аргумент ϕ - угол поворота кулачка и возвращает S - вектор из трёх элементов:
![]() - передаточная функция
перемещения толкателя;
- передаточная функция
перемещения толкателя;
![]() - передаточная функция (аналог)
скорости;
- передаточная функция (аналог)
скорости;
![]() - передаточная функция (аналог)
ускорения.
- передаточная функция (аналог)
ускорения.
Расчёт выполняется для одной из фаз толкателя:
![]() - фаза удаления;
- фаза удаления;
![]() - фаза дальнего стояния;
- фаза дальнего стояния;
![]() - фаза приближения;
- фаза приближения;
![]() - фаза ближнего стояния.
- фаза ближнего стояния.
При вращающемся кулачке угол поворота ϕ находится в интервале 0 ≤ ϕ ≤ 2π. Ход толкателя Н записывается в элемент A0 (A0 = H). Таким образом, при использовании программы должен быть вначале определён вектор А, состоящий из четырёх элементов.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
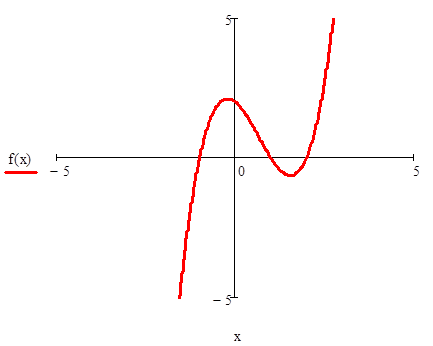
Пример №4
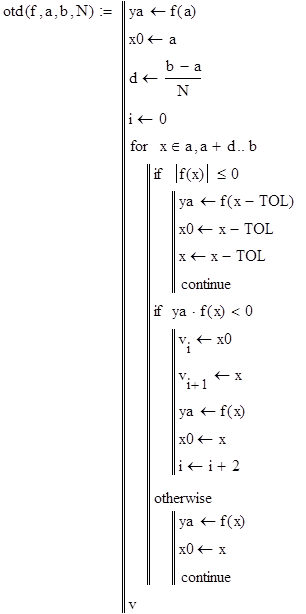
Пусть дано уравнение f(x) = 0. Известно, что отыскание его изолированных действительных корней складывается из двух этапов:
- отделения корней, то есть отыскания интервалов [αi,βi], в которых содержится один и только один корень;
- уточнения приближённых корней, то есть доведения их до значений, обеспечивающих заданную степень точности.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример №5
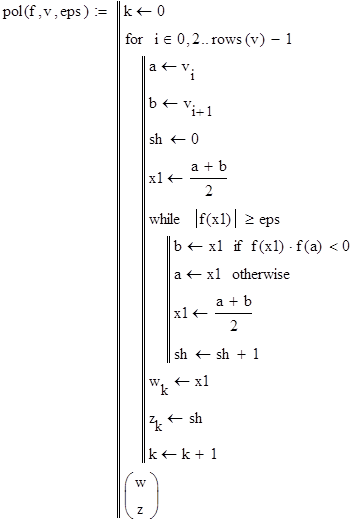
Уточнение приближённых корней,
интервалы для которых найдены выше, выполняется разными методами. Рассмотрим
метод половинного деления. Выбирается интервал [α,β]
и
находится x1. Затем проверяется условие: если ![]() ,
то есть на интервале [α,x1],
функция f(x) поменяла знаки, то интервал [x1,β]
отбрасывается и x1 становится β. Если
условие
,
то есть на интервале [α,x1],
функция f(x) поменяла знаки, то интервал [x1,β]
отбрасывается и x1 становится β. Если
условие ![]() не выполняется, то есть на
интервале [α,x1] функция f(x) не
поменяла знаки, то отбрасывается интервал [α,
x1]
и x1 становится α. Вычисляется
новое значение x1 и процесс повторяется.
не выполняется, то есть на
интервале [α,x1] функция f(x) не
поменяла знаки, то отбрасывается интервал [α,
x1]
и x1 становится α. Вычисляется
новое значение x1 и процесс повторяется.
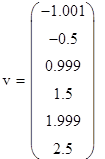
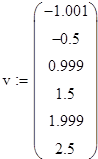
Входными параметрами являются: описание функции f( ), вектор интервалов v, возвращаемый программой отделения корней и заданная степень точности eps.
|
|
|
|
|
|
|
|
|
|
|
|
Пример №6
Программа расчёта эвольвентной функции inv(α)=tg(α) – α работает в двух режимах. В первом режиме (k=0) вводимый параметр α моделирует угол в радианах
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.