Примечание. Вид механизмов – с поступательно движущимся толкателем и коромысловый. Законы изменения ускорения - синусоидальный, косинусоидальный, треугольный, прямоугольный. Допускаемый угол давления в фазе сближения [ϑ] " = 45 град. Радиус ролика rр = 10 мм.
2. По заданному графику
ускорения толкателя путем двукратного графического интегрирования построить
диаграмму перемещений ![]() или
или ![]() .
Рассчитать масштаб μs (мм/мм) или μψ,
(мм/град). Для получения величин μs = 1
и μψ = 1 предварительно рассчитайте отрезок интегрирования Н2.
.
Рассчитать масштаб μs (мм/мм) или μψ,
(мм/град). Для получения величин μs = 1
и μψ = 1 предварительно рассчитайте отрезок интегрирования Н2.
3. Составить таблицы перемещений толкателя (Si, мм; ψi, град) для 14 положений.
4. По данным таблицы перемещений выполнить построение профиля кулачка на приборе ТММ-21.
5. Рассчитать радиусы-векторы для принятых ранее углов поворота кулачка и утлы профиля по формулам (12.8)...(12.15).
6. На бумажном круге вычертить центровой профиль кулачка. Построить конструктивный профиль на расстоянии по нормали rр от центрового профиля.
7. Сформулировать выводы, где дать объяснения погрешностям, имевшимся при построении технологического профиля графическим и аналитическим методами.
Вопросы для защиты работы
1. Какое звено является ведущим в кулачковом механизме?
2. Какую роль играют законы движения толкателя в обеспечении безударной работы кулачкового механизма?
3. Каковы основные этапы проектирования кулачкового механизма?
4. Как определяются основные параметры кулачка?
5. Как выполняется профилирование кулачка?
6. Как строится конструктивный профиль по центровому?
13. Практическое занятие
Определение приведенных параметров
Для облегчения
динамических расчётов многозвенный механизм заменяют одномассовой динамической
моделью, состоящей из звена приведения и стойки. Звено приведения —
одно из звеньев исследуемого механизма,
имеющее ту же скорость, что и в реальном механизме. Если звено приведения — кривошип,
то оно будет обладать приведенным моментом инерции Iп и на
него будет действовать приведенный момент сил ![]() . Приведенный момент сил является эквивалентом
всех сил, действующих на звенья механизма, а приведенный момент инерции —
эквивалентом инертности механизма.
. Приведенный момент сил является эквивалентом
всех сил, действующих на звенья механизма, а приведенный момент инерции —
эквивалентом инертности механизма.
Приведенный момент сил Mп определяется из равенства мощности звена приведения сумме мощностей сил, действующих на звенья механизма. В общем случае приведенный момент сил равен:
![]()
![]()
![]()
![]()
 (13.1)
(13.1)
где k — число сил, действующих на механизм; m — число моментов, действующих на рычажные звенья механизма.
Приведенный момент инерции ![]() определяется из равенства кинетической
энергии звена приведения сумме кинетических энергий звеньев механизма:
определяется из равенства кинетической
энергии звена приведения сумме кинетических энергий звеньев механизма:
 (13.2)
(13.2)
где p — число звеньев механизма; q — число вращающихся звеньев.
Для диадных механизмов расчётные формулы приобретут вид:


Для конкретного из
трёх механизмов будут использованы не все слагаемые. Так, в
кривошипно-ползунном механизме будут отсутствовать слагаемые ![]() ,
, ![]() ,
,
Приложение А
Схемы сложных механизмов
|
|
|
|
Схема 1 |
Схема 2 |
|
|
|
|
Схема 3 |
Схема 4 |
|
|
|
Схема 5 Схема 6
Схема 7 Схема 8
Схема 9 Схема 10
Схема 11 Схема 12
Схема 13 Схема 14
Схема 15 Схема 16
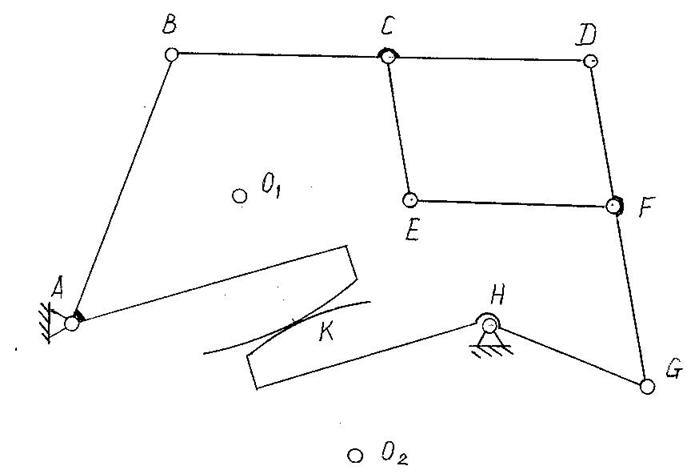
Схема 17
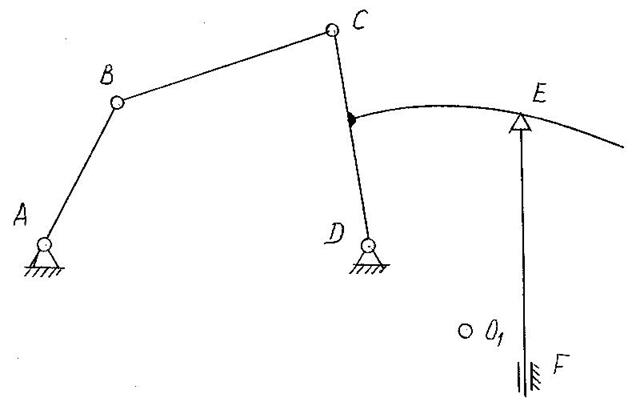
Схема 18
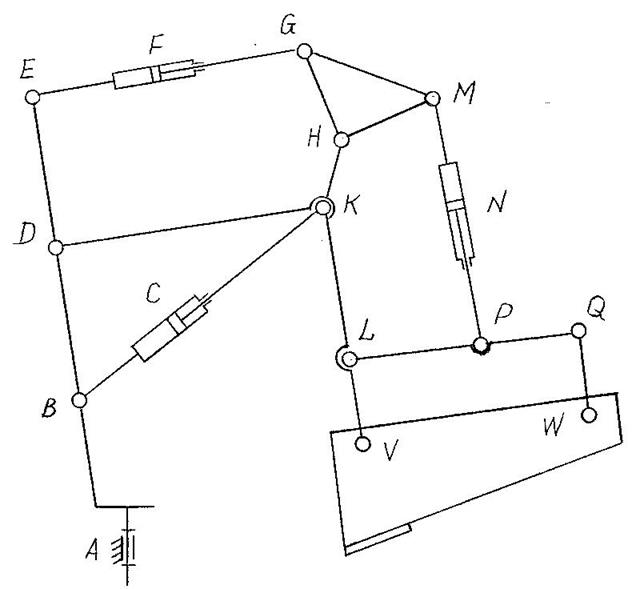
Схема 19
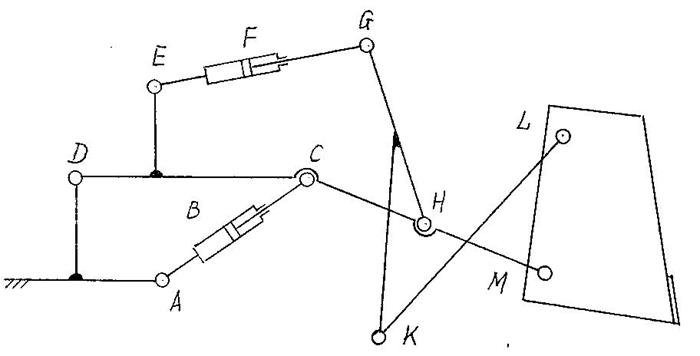
Схема 20
Таблица инволют
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.