Балтийский Государственный Технический Университет
«ВОЕНМЕХ» имени Д.Ф.Устинова
Кафедра систем обработки информации и управления (И3)
Отчет к лабораторной работе №3
Дисциплина: “Системы управления летательными аппаратами”
Тема: “Синтез и исследование цифровой системы нейтрализации упругих колебаний в контуре управления ЛА”
Преподаватель: Юрескул А.Г.
Студент: Рогов А.С.
Группа: И-371
Вариант: 1
Санкт-Петербург
2011 год
Цель работы – синтезировать цифровую систему подавления упругих колебаний.
1) Для исследования цифровой системы нейтрализации упругих колебаний будет использоваться контур продольной стабилизации ЛА.
В блок БЦВМ введем режекторный фильтр, передаточная функция которого имеет вид:
где
![]()
Уравнения объекта управления:
![]()
![]()
![]()
![]()
![]()
Математическая модель рулевых приводов в виде передаточной функции:
где ![]() – транспортное запаздывание рулевого
привода;
– транспортное запаздывание рулевого
привода;
![]() – постоянная времени рулевого привода.
– постоянная времени рулевого привода.
Математическая модель ДУСа в виде передаточной функции:

где ![]()
![]()
Управляющие сигналы, реализуемые автопилотом по курсу и по крену имеют следующий вид:
![]()
![]() ,
, ![]() – передаточные числа автопилота по
углам тангажа;
– передаточные числа автопилота по
углам тангажа;
![]() – передаточное число автопилота высоты.
– передаточное число автопилота высоты.
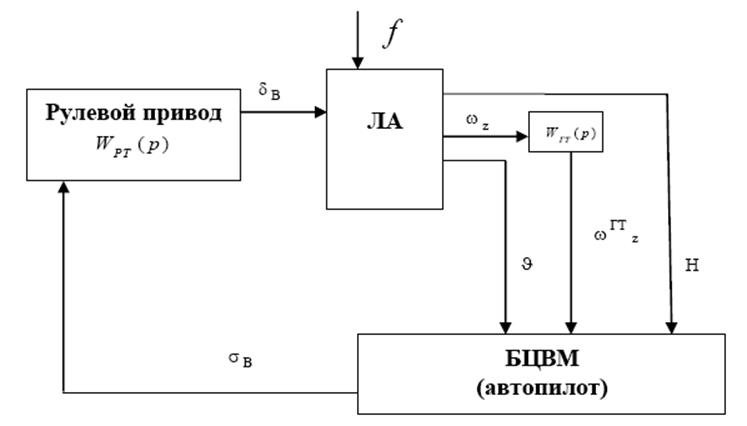
Структурная схема контура продольной стабилизации
Имитационная схема контура, реализованная в среде Simulink

2) Условия моделирования
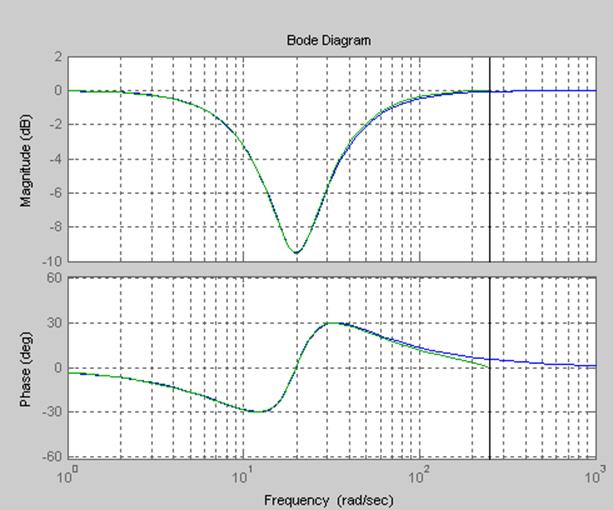
В данной лабораторной работе не удалось достичь подавления -20 дб на частоте 20 Гц, поэтому реализуем подавление -9 дб на частоте 20 Гц.
3) После расчета параметров линейного фильтра упругих колебаний была получена передаточная функция:
4) При переходе от аналогового прототипа линейного фильтра к цифровому корректирующему устройству получается передаточная функция:

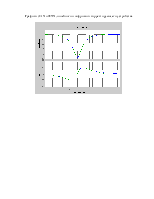
5) Результаты моделирования
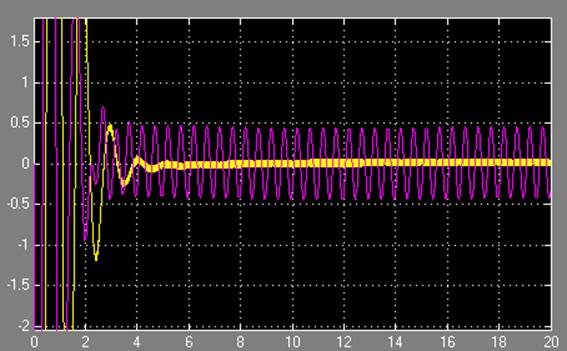
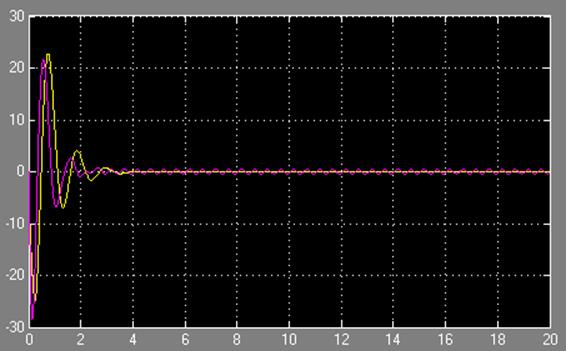
Подавление линейным фильтром
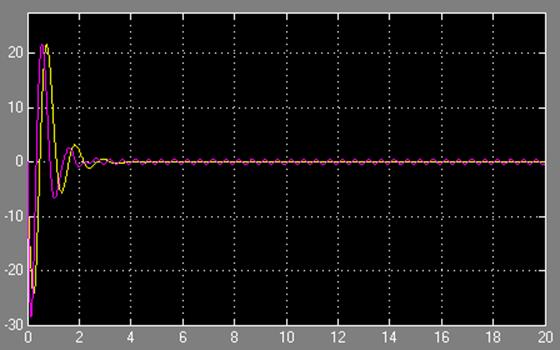
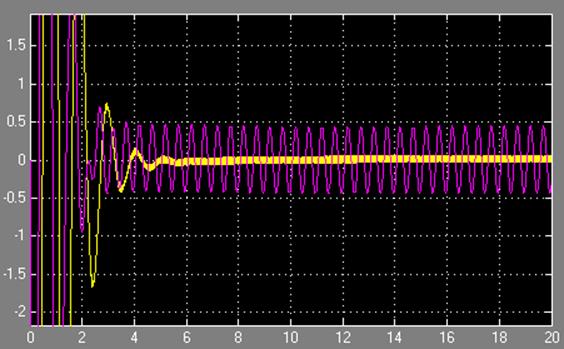
Подавление цифровым корректирующим устройством
Графики ЛАХ и ФЧХ линейного и цифрового корректирующего устройства
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.