|
Балтийский государственный технический университет «ВОЕНМЕХ» им. Д.Ф.Устинова |
|
|
Домашняя работа №1 Дисциплина: “Системы управления ЛА” |
|
|
Преподаватель: Готин С.В. Студент: Данилов Е. В. Группа И371 Вариант 2 |
|
|
Санкт-Петербург 2010 год |
|
Исходные данные:Движение ЛА в канале нормальной стабилизации описывается следующими уравнениями:
 ;
;
 ;
;
Где ![]() –
отклонение по тангажу от программного значения;
–
отклонение по тангажу от программного значения;
y – отклонение ЦМ ЛА от программной траектории в направлении нормали к ней;
d – угол отклонения рулевых органов;
![]() коэффициент
статической устойчивости;
коэффициент
статической устойчивости;
![]() коэффициент
фиктивности рулей;
коэффициент
фиктивности рулей;
![]() составляющие
возмущений в канале углового движения и центра масс.
составляющие
возмущений в канале углового движения и центра масс.
Задание: Определить
структуру и параметры закона управления в контуре стабилизации тангажа ![]() , обеспечивающие стабилизацию ЛА по тангажу
с точностью
, обеспечивающие стабилизацию ЛА по тангажу
с точностью ![]() при следующих значениях коэффициентов:
при следующих значениях коэффициентов:
![]() с-2;
с-2;![]() с-2,
с-2,![]() c-2,
c-2, ![]() м/c2;
м/c2;
![]() м/(рад·с2),
м/(рад·с2),![]() м/(рад·с2).
м/(рад·с2).
Компоновка ЛА – статически
неустойчивый, передаточная функция рулевого привода  ,
,![]() ,
,![]() с.
с.
Построить границу области устойчивости
для коэффициентов закона управления, выбрать рабочую точку системы, учитывая
возможное изменение во время полета коэффициента ![]() (±10%)
и постоянной времени привода
(±10%)
и постоянной времени привода ![]() (+20%). Построить
графики переходных процессов
(+20%). Построить
графики переходных процессов ![]() и
и ![]() , возникающих в системе при воздействии
ступенчатого возмущения
, возникающих в системе при воздействии
ступенчатого возмущения ![]() .
.
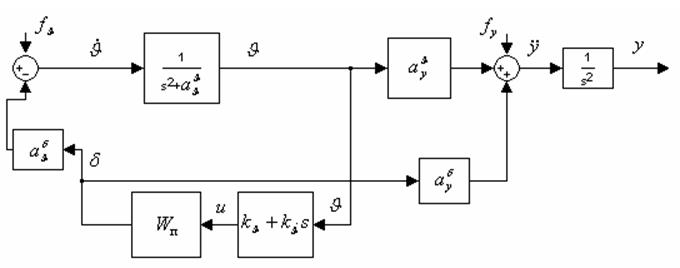
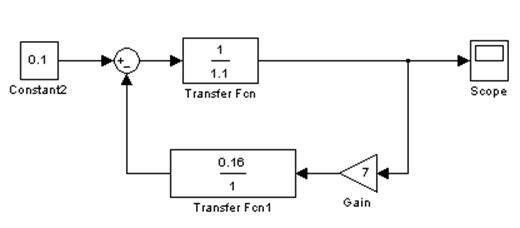
Структурная схема исследуемой системы управления:


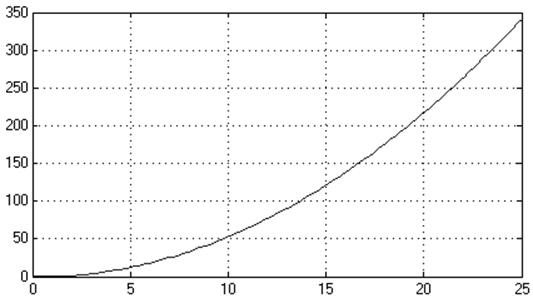
Построим границу областиустойчивости для коэффициентов закона управления:
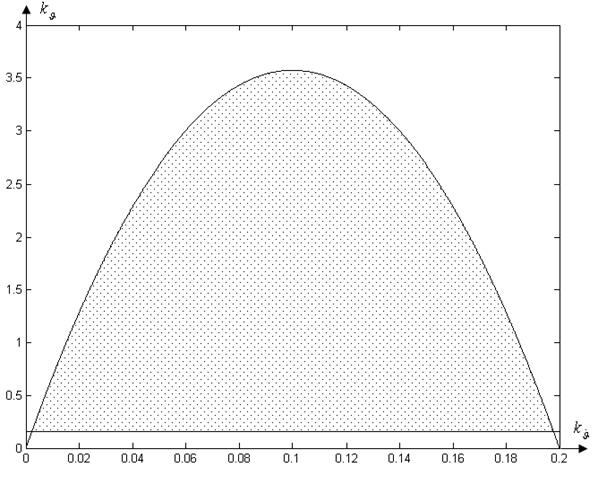
Рис.1
Выберем рабочую точку системы, учитывая возможное
изменение во время полета коэффициента ![]() (±10%)
и постоянной времени привода
(±10%)
и постоянной времени привода ![]() (+20%).
(+20%).
Выберем рабочую точку системы из левой нижней области устойчивости (0.1;0.16) и промоделируем систему:
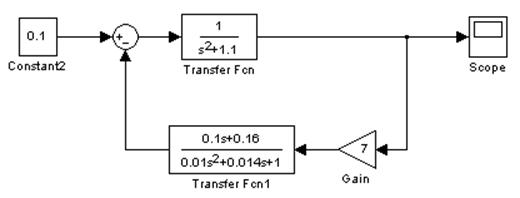
График ![]()
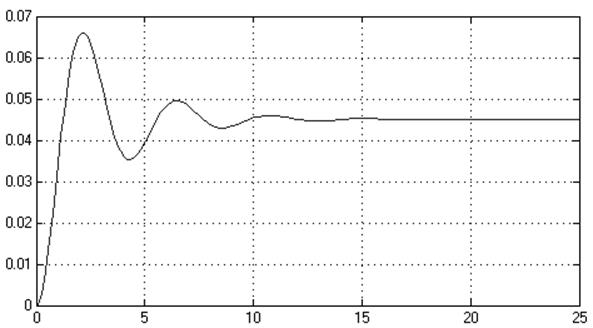
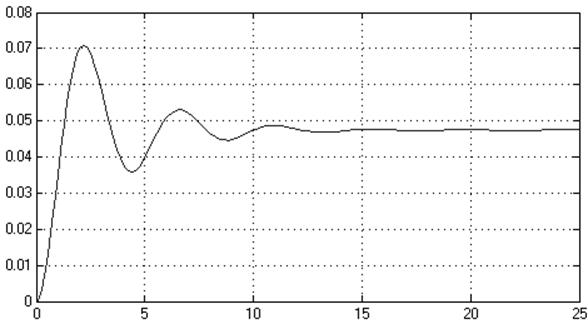
График ![]() при изменении
при изменении ![]() (+10%) и
(+10%) и
![]() (+20%):
(+20%):
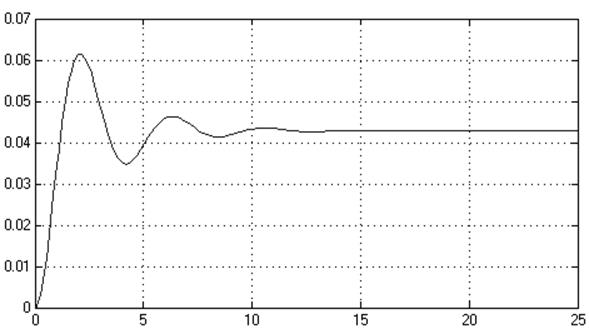
График ![]() при изменении
при изменении ![]() (-10%) и
(-10%) и ![]() (+20%):
(+20%):
![]()
По условию задачи ![]()
Однако из рис.1 видно, что![]() Следовательно,
можно сделать вывод, что при условиях данной задачи нельзя добиться требуемой
точности
Следовательно,
можно сделать вывод, что при условиях данной задачи нельзя добиться требуемой
точности![]()
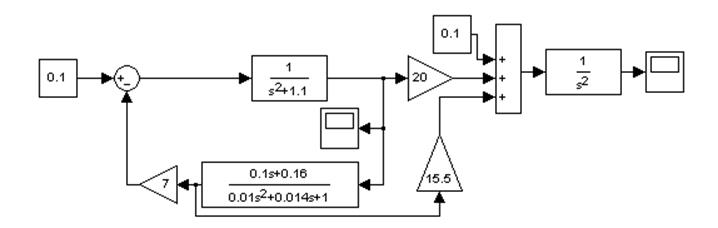
График ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

