
Лекция 17. Назначение, принципы построения и основные особенности компьютерных систем управления
Современная тенденция развития систем управления основана на использовании в качестве устройств управления специализированных или универсальных компьютеров. Компьютерные системы управления имеют ряд важных преимуществ:
- минимальное потребление энергии;
- малые габариты и масса устройств управления;
- возможность реализации любых сложных законов управления, в том числе многоканальных, оптимальных и адаптивных;
- универсальная программная реализация произвольных законов управления.
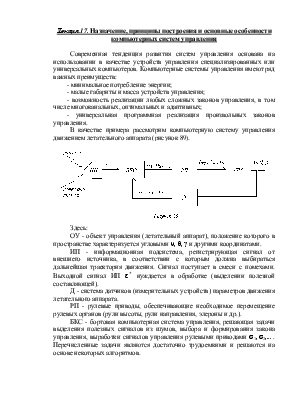
В качестве примера рассмотрим компьютерную систему управления движением летательного аппарата (рисунок 89).
Здесь:
ОУ - объект управления (летательный аппарат), положение которого в пространстве характеризуется угловыми u, q, g и другими координатами.
ИП - информационная подсистема, регистрирующая сигнал
от внешнего источника, в соответствии с которым должна выбираться дальнейшая
траектория движения. Сигнал поступает в смеси с помехами. Выходной сигнал ИП ![]() нуждается в обработке (выделении полезной
составляющей).
нуждается в обработке (выделении полезной
составляющей).
Д - система датчиков (измерительных устройств) параметров движения летательного аппарата.
РП - рулевые приводы, обеспечивающие необходимое перемещение рулевых органов (рули высоты, рули направления, элероны и др.).
БКС - бортовая компьютерная система управления, решающая задачи выделения полезных сигналов из шумов, выбора и формирования закона управления, выработки сигналов управления рулевыми приводами s1, s2,... . Перечисленные задачи являются достаточно трудоемкими и решаются на основе некоторых алгоритмов.
Отметим особо наличие в системе устройств, состояние и поведение которых характеризуется сигналами с принципиально разным характером изменения:
- объект управления, измерительные и исполнительные устройства являются устройствами непрерывного действия;
- устройство управления (БКС) дискретного действия.
Для учета особенностей процессов в таких системах при решении задач их анализа и синтеза приходится использовать специальный математический аппарат.
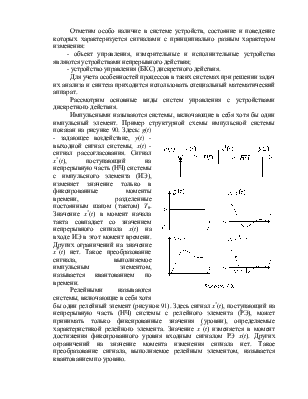
Рассмотрим основные виды систем управления с устройствами дискретного действия.
 Импульсными называются системы,
включающие в себя хотя бы один импульсный элемент. Пример структурной схемы
импульсной системы показан на рисунке 90. Здесь: g(t) - задающее
воздействие, y(t) - выходной сигнал системы, x(t) -
сигнал рассогласования. Сигнал x*(t), поступающий на
непрерывную часть (НЧ) системы с импульсного элемента (ИЭ), изменяет значение
только в фиксированные моменты времени, разделенные постоянным шагом (тактом) T0.
Значение x*(t) в момент начала такта совпадает со
значением непрерывного сигнала x(t) на входе ИЭ в этот момент
времени. Других ограничений на значение x*(t) нет.
Такое преобразование сигнала, выполняемое импульсным элементом, называется
квантованием по времени.
Импульсными называются системы,
включающие в себя хотя бы один импульсный элемент. Пример структурной схемы
импульсной системы показан на рисунке 90. Здесь: g(t) - задающее
воздействие, y(t) - выходной сигнал системы, x(t) -
сигнал рассогласования. Сигнал x*(t), поступающий на
непрерывную часть (НЧ) системы с импульсного элемента (ИЭ), изменяет значение
только в фиксированные моменты времени, разделенные постоянным шагом (тактом) T0.
Значение x*(t) в момент начала такта совпадает со
значением непрерывного сигнала x(t) на входе ИЭ в этот момент
времени. Других ограничений на значение x*(t) нет.
Такое преобразование сигнала, выполняемое импульсным элементом, называется
квантованием по времени.
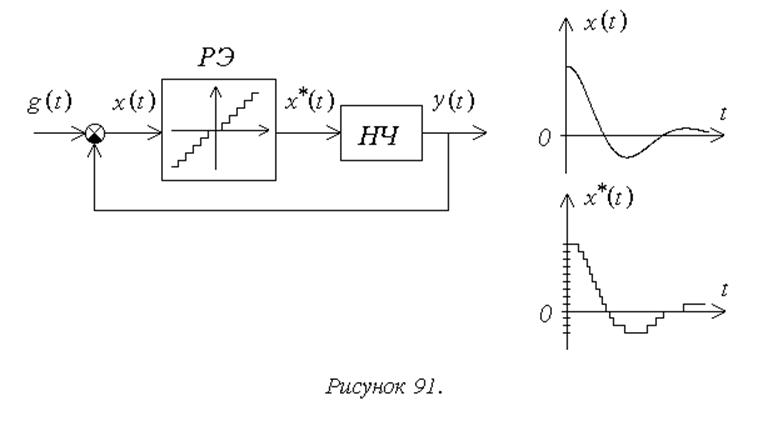
Релейными называются системы, включающие в себя хотя бы один релейный элемент (рисунок 91). Здесь сигнал x*(t), поступающий на непрерывную часть (НЧ) системы с релейного элемента (РЭ), может принимать только фиксированные значения (уровни), определяемые характеристикой релейного элемента. Значение x*(t) изменяется в момент достижения фиксированного уровня входным сигналом РЭ x(t). Других ограничений на значение момента изменения сигнала нет. Такое преобразование сигнала, выполняемое релейным элементом, называется квантованием по уровню.
В системах компьютерного управления (цифровых автоматических системах) устройство управления строится на основе микропроцессоров (ЦВМ), характерными особенностями которых являются:
- работа в дискретном времени;
- представление сигналов в цифровой (дискретной) форме - в виде двоичных кодов.
Следовательно, в таких системах управления присутствуют оба вида квантования сигнала: по времени и по уровню.
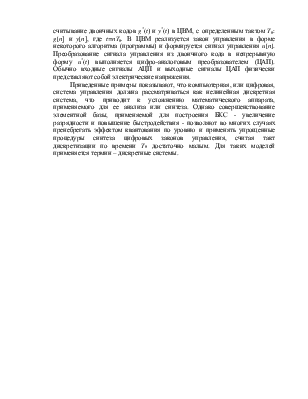
Пример структурной схемы компьютерной системы управления показан на рисунке 92.
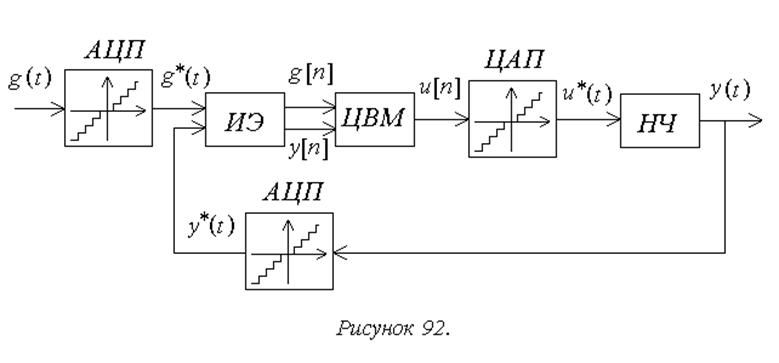
Для преобразования сигналов g(t) и y(t) из непрерывной (аналоговой) формы в цифровую служат аналого-цифровые преобразователи (АЦП). АЦП может рассматриваться как релейный элемент, количество уровней выходного сигнала которого определяется разрядностью формируемого преобразователем двоичного кода. Импульсный элемент обеспечивает считывание двоичных кодов g*(t) и y*(t) в ЦВМ, с определенным тактом T0: g[n] и y[n], где t=nT0. В ЦВМ реализуется закон управления в форме некоторого алгоритма (программы) и формируется сигнал управления u[n]. Преобразование сигнала управления из двоичного кода в непрерывную форму u*(t) выполняется цифро-аналоговым преобразователем (ЦАП). Обычно входные сигналы АЦП и выходные сигналы ЦАП физически представляют собой электрические напряжения.
Приведенные примеры показывают, что компьютерная, или цифровая, система управления должна рассматриваться как нелинейная дискретная система, что приводит к усложнению математического аппарата, применяемого для ее анализа или синтеза. Однако совершенствование элементной базы, применяемой для построения БКС - увеличение разрядности и повышение быстродействия - позволяют во многих случаях пренебрегать эффектом квантования по уровню и применять упрощенные процедуры синтеза цифровых законов управления, считая такт дискретизации по времени T0 достаточно малым. Для таких моделей применяется термин – дискретные системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.