Точность идентификации будем определять по величине ошибки Dhmax , определяемой по графику с выхода блока 4. При моделировании выбираем метод Кутта-Мерсона, время конца интегрирования tk задаем равным времени окончания эксперимента (с пересчетом в сек).
6. Порядок и методика выполнения работы.
Схема экспериментальной установки изображена на рис. 6.
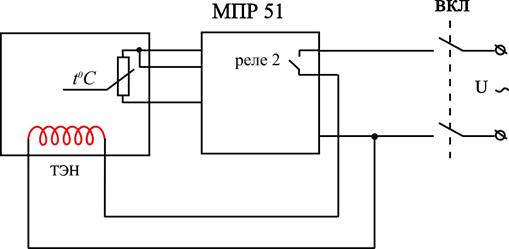
Рис. 6. Схема экспериментальной установки
1. Включением выключателя подать напряжение на МПР 51. Убедиться, что температура ТЭН имеет установившееся значение и записать это значение.
2. Установить задатчиком регулятора МПР51 значения температуры 1900С (по указанию преподавателя). Для этого в режиме ПРОГРММИРОВАНИЯ L1. Выбираем параметр Е02 (задается значение уставки в данном случае 1900С). Записываем изменения в память прибора. Выходим из режима программирования и запускаем программу двухпозиционного регулирования.
3. С этого момента через каждые 60 с (время с точностью до минуты отображается на индикаторе прибора) фиксировать температуру объекта регулирования и записывать в таблицу отчета. Эксперимент закончить после того, как процесс регулирования примет установившийся характер.
4. Построить по экспериментальным точкам переходные характеристики объекта при ее нагреве в координатах: температура по оси ординат, время по оси абсцисс.
5. Полученные характеристики аппроксимировать переходной характеристикой одноемкостного объекта с запаздыванием.
6. По полученной экспериментально характеристике определить динамические параметры ЭН, время запаздывания t и постоянную времени объекта Т. а) графическим способом см.раздел 3, б) численным методом см. раздел 4, в) аналитический метод см. раздел 5.
Отчет
О лабораторной работе №2
Экспериментальное определение динамических свойств объекта регулирования измерительных схем
|
Ф.И.О. исполнителя |
Учебная группа № |
Дата проведения |
Отметка преподавателя |
1. Цель работы
Ознакомиться с методикой определения динамических свойств объектов регулирования по экспериментально полученным переходным характеристикам.
3.Таблица данных.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.