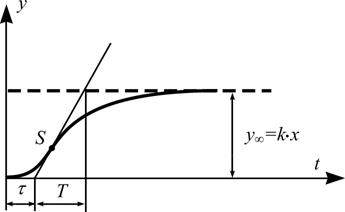
Рис.4. Переходная характеристика двухемкостного объекта.
Отрезок времени от начала нанесения возмущения до точки пересечения касательной с осью времени составит запаздывание t.
Отрезок времени от момента пересечения касательной с осью времени до момента пересечения ее с линией нового установившегося значения выходной величины принимается за постоянную времени объекта Т.
Индивидуальные свойства различных объектов, например одноемкостных, проявляются в том, что при одинаковом возмущении окажутся различными значения коэффициента передачи К и постоянной времени Т. Именно для их нахождения ставится эксперимент по снятию переходной характеристики. Эти величины определяют характер протекания переходных процессов, их динамику и относятся поэтому к динамическим характеристикам объекта.
Следует отметить, что для многих объектов переходные характеристики, полученные при увеличении входной величины и при ее уменьшении, существенно различны. Естественно, что получаются и различные значения динамических параметров объекта.
4. Численный метод расчета
Кроме графического метода можно воспользоваться численным. Для этого определяют абсциссы точек, ординаты которых равны:
Y(tII) = 0,33 у (∞)+Y(0);
Y(tI) = 0,7 у(∞)+Y(0),
Где у(∞)=Ук –У(0)-приращение кривой разгона за время переходного процесса;
Ук , У(0) – конечное и начальное соответственно значения кривой разгона.
По вычисленным значениям ординат, производя обратное преобразование, находим значения абцисс tII, tI , по которым и определяются искомые асимптотические параметры:
τз = 0,5 (3tII- tI); Т = 1,25 (tI - tII).
Таким образом, при проектировании АСР динамику объекта можно описывать двояко либо точной передаточной функцией (3) ,
W(p)= ,
(3)
,
(3)
либо приближённой (4).
Wэ(p)= (4)
(4)
В первом случае используют достаточно точные методы анализа и синтеза АСР (частотные, корневые и т.д.). Во втором – приближённые (графоаналитические). Рассмотрим порядок нахождения Т аналитическим способом.
5. Аналитический метод.
Для проверки точности идентификации в СИАМ набираем схему, изображенную на рис.8.4.
 |
Здесь блоки 1,2 моделируют экспериментальную переходную функцию, блоки 5-10 – апериодическое звено с запаздыванием. Выходной сигнал блока 6
Но сигнал x9³ 0тогда, когда разность x8 – x10³ 0или
t³k10 (k10 =t., т.е.величина коэффициента k10равна времени запаздывания t). Таким образом,
Реальный процесс может продолжаться десятки минут,
поэтому с целью сокращения времени расчетов на ЭВМ необходимо использовать
масштабирование во времени: tМ = kМt. Если положить kМ = 1/60, то
1 с машинного времени будет соответствовать 1 мин реального процесса. Как при
этом изменится передаточная функция (8.3)? Как известно, переменной
преобразования Лапласа p соответствует
оператор d/dt. С учетом масштабирования ![]() , dt = dtМ /
kМ
, dt = dtМ /
kМ
 и
и ![]() , тогда формула (8.3) в машинных переменных
запишется так:
, тогда формула (8.3) в машинных переменных
запишется так:
 .
(8.7)
.
(8.7)
Таким образом, в схеме СИАМ на рис.8.3 в блоке 2 можно задавать экспериментальную переходную функцию в секундах, в блоке 7 параметр T11 = TМ = T0 kМ = T0 / 60, в блоке 10 параметр k11 = tМ = kМt = t / 60.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.