_ Метод фиксации
АТС основан на сравнении цветов каждого пиксела матрицы- фиксации Мм„а„раПЛ
с пикселами матрицы фиксации следующего кадра Микшера.
Если цвет пиксела в матрице фиксации M№lWa»i[i,Jl
изменился по сравнению с цветом пиксела матрицы Мм,кадра[и],
то пиксел формируемой матрицы сравнения S[ij]=1,
иначе О
900
• i 10 Ч 20 It JO И «О 4S 30
■Ш ' .........
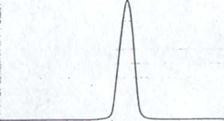
Рис 12 График S[i,j] и интервал фиксации АТС
Как видно из графика, при проезде АТС через область фиксации количество единиц в матрице S[i,j] резко возрастает. Также, если АТС «покидает» область фиксации, то количество единиц резко падает Исходя из характера изменения матрицы S[ij], можно сделать вывод, что АТС проехало через область фиксации.
3.3. Примеры применения
3.3.1. Оценка направления движения
С помощью оценки матрицы Ми^а можно оценить направление движение АТП за счет характера смещения 0 и 1 в матрице АТС, проезжающее через область фиксации, дает смещение матрицы Мм„адра, а именно смещение 1 По характеру смещения можно определить пе ремещение АТС через область фиксации
Как видно из представленной матрицы М|*кадра, можно оценить направление движения АТС, проходящего через область фиксации
3.3.2. Оценка
плотности движения АТП
Оценку плотности АТП можно провести если матрица М»ВДРа.
будет занимать всю область следования АТС.
Следовательно, фиксируя области изменения матрицы М№кадра,
можно установить плотность движения потока АТС.
Пример области, фиксирующей плотность АТП, приведен ниже на рис. 13.

Рис. 13. Соотношение области фиксации плотности АТС и зафиксированных АТС ЕЭ - зафиксированные АТС;
- область фиксации плотности движения АТП
3.4. Метод базовых матриц
Рассмотренный метод базовой матрицы (п 3) имеет смысл расширить введением cd-вокупности матриц, фиксирующих потоки АТС на различных полосах движения Данное введение позволяет производить мониторинг на всех полосах движения.
|
|
|
Рис 14 Расположение матриц на кадре видеофрагмента |
Рассмотрим кадр видеофрагмента и расположенные на нем матрицы фиксации
3.5. Фиксация АТП на многополосной дороге с ограниченной видимостью
|
|
|
Рис. 15. Кадр видеопотока с перекрытием |
|
41 |
|
I |
 |
Как видно (рис 16), из 10 полос движения АТП ракурс камеры охватывает 8 полос движения Крайние полосы движения ракурс камеры не охватывает.
Приведенная схема ракурса съемки характеризует видимость полос движения АТП. Как видно из схемы, наиболее отчетливо
просматриваемыми полосами движения являются 5 и 6. Автомобили, движущиеся по этим полосам, отчетливо просматриваются ракурсом. Полосы 2, 3, 4 и 7, 8, 9 являются полосами движения с частичным охватом АТП ракурсом съемки
Рассмотрим метод фиксирования АТС на полосах движения.
Метод фиксирования движения потока АТС для приведенного ракурса съемки основывается на определении зависимостей фиксаций движения матриц Данный метод позволяет разграничить АТС, движущиеся по различным полосам движения
Рассмотрим методы разграничения фиксирования АТС при наложении проекции АТС на соседнюю полосу движения
Данный метод основан на алгоритме проверки одновременной фиксации АТС для заданных матриц. Если АТС, движущееся по полосе, попадет не только в матрицу фиксации на своей полосе, но и в соседнюю (при этом время идентификации совпадает), то АТС будет зафиксировано только на одной полосе. На рисунке 17 показана схема проезда АТС по полосе движения.
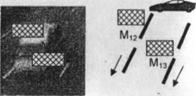
Рис. 17. Движение проекции АТС по полосе движения
Исходя из метода, приведенного выше, можно установить зависимости для всех полос движения АТС.
Таблица 3
Таблица определения зависимости
|
Матрица фиксации |
Зависимость ... |
|
М„ |
М„ |
|
М,г |
М„ |
|
М„ |
М„ |
|
Мм |
- |
|
М„ |
М,, |
|
м„ |
м„ |
|
м„ |
Ми |
|
M,s |
- |
Пакет предполагает установку площади фиксации ([ 1 в матрице фиксации) для порога идентификации АТС для каждой из областей.
Выражаю благодарность доктору физико-математических наук, профессору Буслаеву А.П. за помощь в написании данной статьи
Заключение
Описанная технология используется отделом математического моделирования (ОММ МАДИ-ГТУ) для автоматического мониторинга автотранспортных потоков Данная разработка позволяет производить мониторинг АТП в реальном времени и получать такие его характеристики, как интенсивность, скорость, идентификация типов АТС
По техническим заданиям данная технология тестировалась и успешно себя зарекомендовала для получения характеристик на федеральных автодорогах Подмосковья как в случае выезда на дорогу, так и в режиме анализа записи видеоизображения с дороги. Производились экспериментальные измерения характеристик потоков (идентификация и распределение по типам АТС, оценка плотности потока).
Тестирование программного обеспечения производилось на федеральных автодорогах Подмосковья подъезд к аэропорту «Домодедово», М2 «Крым», МЗ «Украина», М4 «Дон», М5 «Урал», М6 «Каспий», М8 «Холмо-горы», М9 «Балтика».
Список литературы
1.Васильев А.П., Фримштейн М.И. Управление движением на автомобильных дорогах. - М.: Трансп., 1979г.-295 с
2.Вероятностные и имитационные подходы к оптимизации автодорожного движения/ А.П.Буслаев, А.В.Новиков, В.М.Приходько и др.; /Под ред. В.М.Приходько. - М.: Мир, 2003. - 368 с.
3.Автотранспортные потоки и окружающая среда /В.Н.Луканин, А.П.Буслаев, М.В.Яшина, Ю.В.Трофименко. - М : ИНФРА-М, 1998. - 408 с.
4Мониторинг автотранспортных потоков и методы автоматической обработки информации / A.II.Буслаев. АИХохлов и др.// Результаты ис-след по подпрограмме 205 "Трансп." НТП Минобразования РФ "Науч. исслед высш. шк. по приоритетным направлениям науки и техники" за 2001-2002 годы. Москва, 2003 г./ МАИ-М.,2003 - С.92-93.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.