
1. ИССЛЕДОВАНИЕ МЕХАНИЗМА НАСОСА
1.1. Кинематическая схема машинного агрегата
Машинный агрегат состоит из трех последующих механизмов:
А - электродвигатель;
В - редуктор;
С - двух поршневой насос двойного действия типа ЭНП-4;
Механизм поршневого насоса представляет собой два параллельно соединенных центральных кривошипно-ползунных механизма (КПМ), кривошипы, которых смещены относительно друг друга на 90°. В насосе двойного действия оба хода поршня являются рабочими. Это означает что в рабочем цилиндре, где расположен поршень, по одну сторону происходит всасывание, а по другую нагнетание. Вследствие этого на поршень постоянно действуют сила давления жидкости направленная против его движения.
Кривошипы насоса конструктивно оформлены в виде коленчатого вала. Поскольку число оборотов коленчатого вала неравно числу оборотов электродвигателя, то между электродвигателем и насосом находится редуктор, который представляет собой последовательное соединение трехзвенных зубчатых механизмов помещенных в отдельный корпус предназначенный для изменения параметров мощности.
1.2. Кинематическая схема криво шипно-ползунного механизма
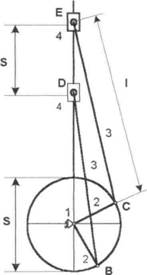
1 - стойка;
2 - кривошипы АВ и ВС;
3 ~ шатуны BD и СЕ;
4 - поршни;
Рис.2
|
0) |
|
(2) (3) |
1.3 Кинематический синтез
Определяем размеры звеньев 1 Г
л = -=а
1
Определяем ход ползуна
S^'^^AM-^.^^
соср ^ у/Определяем длину кривошипа
гаа^гас =7.^ А^-= ^ ^
2 ^
Определяем длину шатуна
IBD =ICE = ^ =^€-'- ^ ^ ^^ (4) A ^^^
1.5. Кинематический анализ 1.5.1. Построение планов механизма и определение крайних положений.
Для построения планов механизма выберем масштабный коэффициент (J,l и вычисляем отрезки чертежа
^-^'-s (s)
|
ВЕ> ==СБ Ri=(l+r) |
|
1вг> |
|
(6) (7) |
R2=(l-r) (8) Радиусом равным АВ проводим окружность, а так как кривошипы АВ и АС имеют равномерное вращательное движение и совершают полный оборот, то делим окружность на двенадцать равных частей через каждые тридцать градусов Каждое положение точек В и С обозначаем определенным номером. Для определения крайних положений (КПМ) из точки А делаем засечки радиусами определяемыми формулами (7) и (8) по прямой ADE (по вертикали), по которому движется ползун.
Построение планов механизма, начинаем с плана механизма для положения точки В в одинадцатой позиции. Из точки В и радиусом равным BD делаем засечку на линии движения точки D т.е. по вертикали. Полученную точку Dn соединим прямой линией с точкой В и и определим тем самым положение шатун BD в позиции 11. При точке Dn изображаем поршень. Аналогично строим планы механизмов для остальных 11 положений.
Далее задаемся положением второго кривошипа АС, который смещен относительно первого на девяносто градусов. Точка С будет находиться в восьмо1 положении. Аналогично из точки радиусом СЕ делаем засечки на линию движения точки Е, направляющей поршня. Полученную точку Е соединяем прямой линией с точкой С и определяем тем самым положение шатуна СЕ в восьмом положении. При точке Es изображаем поршень в виде прямоугольника движущегося в неподвижных направляющих. Аналогично и для других положений второго (КПМ).
1.5.2. Построение планов скоростей Величина скорости точки В определяется по формуле (9)
Vg := Гдв • со ^р гW^fi ^ = О W (9)
Направление скорости точки В определяется в соответствии с направлением
(Окр перпендикулярно АВ. Модуль | Ув| = | Vc | (модуль скорости точки vb равен модулю скорости точки Vc и постоянен для всех положен и).
Связь между скоростью точки D и скоростью точки В (обе точки принадлежат звену 3) задается уравнением (10)
VD=VB+Vbb (10)
Здесь и в дальнейшем вектор известный по величине и направлению подчеркиваем двумя линиями, а вектор известный только по направлению подчеркиваем одной линией.
Для определения указанных неизвестных элементов строим план скоростей.
Выбрав масштабный коэффициент рл^ вычисляем отрезок Рв по формуле (11)
р^^^
ру o,ooi
Скорость vb в соответствии с уравнением откладываем от произвольной точки Р (полюс плана скоростей) найденый отрезок Рв, через конец этого отрезка (точю
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.