

В состав ![]() входят
звенья:
входят
звенья:
1. интегрирующее;
2. форсирующее 1 порядка;
3. апериодическое;
4. форсирующее 1 порядка;
5. форсирующее 1 порядка;
6. апериодическое.
Следовательно передаточная функция:
![]() =
= 
Для проверки правильности передаточной функции, построим по ней желаемую ЛАЧХ:
![]() ·
·![]() =·
=· =
=
= 
Из полученной передаточной функции видно, что она совпадает с построенной желаемой ЛАЧХ с небольшой погрешностью.
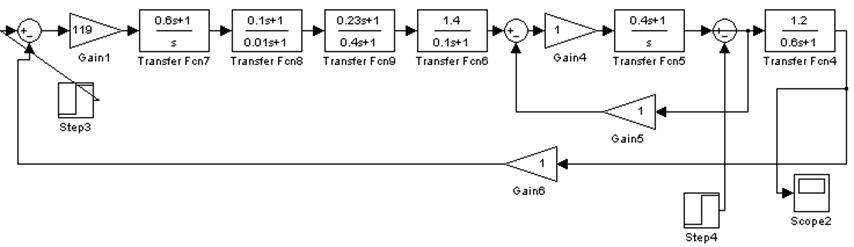
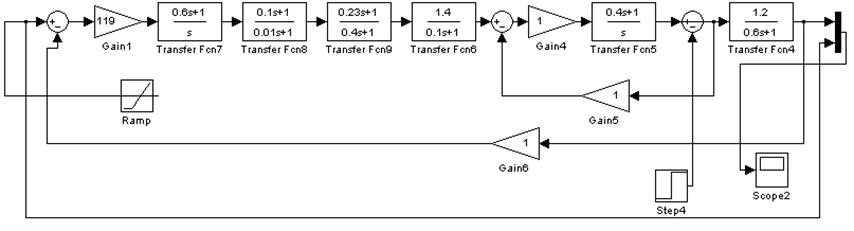
2.4 Составить структурную схему синтезированной САУ с учетом последовательного корректирующего устройства.
Схема скорректированной САУ:
2.5 Рассчитать запас устойчивости по фазе скорректированной САУ и сравнить полученное значение с требуемой величиной.

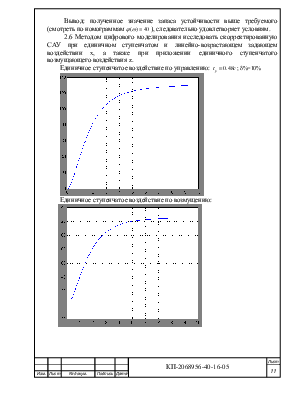
Вывод: полученное значение запаса
устойчивости выше требуемого (смотреть по номограммам ![]() = 40 ),
следовательно удовлетворяет условиям.
= 40 ),
следовательно удовлетворяет условиям.
2.6 Методом цифрового моделирования исследовать скорректированную САУ при единичном ступенчатом и линейно-возрастающем задающем воздействии x, а также при приложении единичного ступенчатого возмущающего воздействия z.
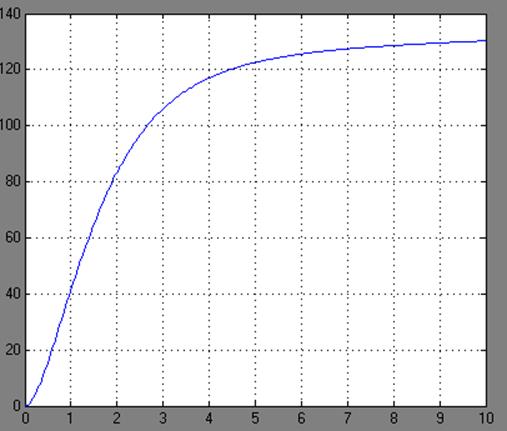
Единичное ступенчатое
воздействие по управлению: ![]() ;
δ%=10%
;
δ%=10%
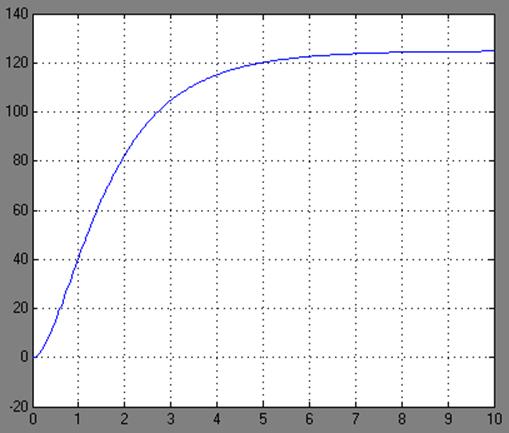
Единичное ступенчатое воздействие по возмущению:
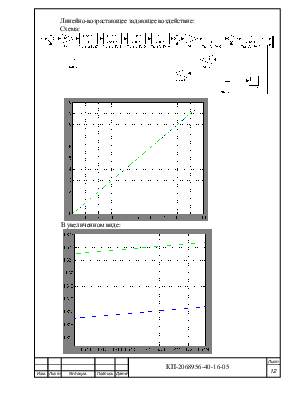
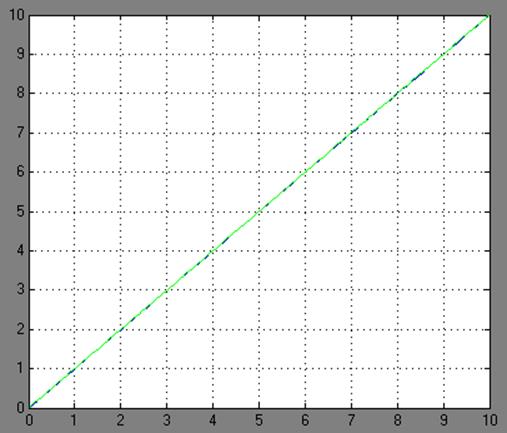
Линейно-возрастающее задающее воздействие:
Схема:
В увеличенном виде:
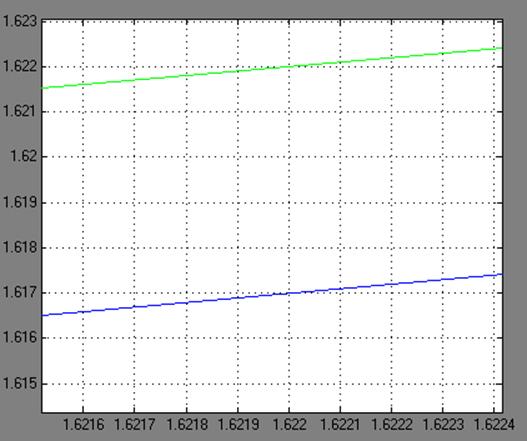
Вывод: из полученного графика видно, что полученная скоростная ошибка моделирования совпадает с той что мы задавали вначале.
Вывод: В следствии проделанной работы видно, что при применении корректирующего устройства и при известных ошибках, улучшаются качества САУ (то есть она быстрее достигает установившегося режима).
Видно, что с помощью корректирующего устройства обеспечивается устойчивость и повышаются запасы устойчивости, обеспечиваются желаемые показатели качества.
Список используемой литературы:
1. А.А. Воронов «Теория Автоматического Управления» изд. «Высшая школа», Москва, 1977.
2. А.С. Востриков, Г.А. Французова «Теория Автоматического Управления» изд. «НГТУ», Новосибирск, 2003.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.