Санкт-петербургский государственный университет информационных технологий механики и оптики.
РАСЧЕТНАЯ РАБОТА
По курсу Электромеханические системы.
Вариант 61
Выполнил студент: Атанасян Тигран
Группа №: 3147.
Преподаватель: Быстров С.В
Санкт-Петербург.
2006 год.
Задание:
1. Выбрать двигатель постоянного тока для САУ
2. Найти оптимальное передаточное число редуктора
3. Определить вид передаточной функции двигателя и найти её параметры с учётом влияния редуктора и нагрузки
Исходные данные:
Момент сопротивления нагрузки Мн=0.3 Н·м
Момент инерции нагрузки Jн=6.57 кг·м2
Максимальная скорость вращения нагрузки Ωм=1.2 рад/с
Максимальное ускорение нагрузки εм=1.9 рад/с2
Найдём примерную номинальную мощность двигателя:
![]()
Подберём двигатель.
Выберем двигатель Dunkermotoren BG 40*50, 24 VDC
![]()

Основные характеристики двигателя приведены в таблице 1.
Таблица 1
Основные характеристики двигателя
|
Название двигателя |
Момент инерции,
|
Выходная мощность, Вт |
Напряжение, В |
Ном. скорость, об/мин |
КПД, % |
Масса, кг |
|
Dunkermotoren BG 40*50 |
6.4* |
32 |
24 |
3640 |
62 |
0.6 |
Найдём оптимальное передаточное число.
В соответствии с оптимальным передаточным числом выберем редуктор.
Основные характеристики редуктора приведены в таблице 2.
Таблица 2
 Основные
характеристики редуктора
Основные
характеристики редуктора
|
Название редуктора |
Передаточное число |
КПД, % |
Количество ступеней |
Масса, кг |
|
Dunkermotoren PLG 75 |
304.5 |
61 |
3 |
3.7 |
Так как момента инерции редуктора производитель не заявил,
берем приближенное значение: JР=0.3·JДВ=0.3·6.4*![]() =1.92·10-5
[кг·м2]
=1.92·10-5
[кг·м2]
Проверим соотношение мощностей PДВ≥PТР
Соотношение неверно.
Выберем иной двигатель.
Выберем двигатель Dunkermotoren BG 44*50 SI, 24 VDC

Основные характеристики двигателя приведены в таблице 3.
Таблица 3
Основные характеристики двигателя
|
Название двигателя |
Момент инерции,
|
Выходная мощность, Вт |
Напряжение, В |
Ном. скорость, об/мин |
КПД, % |
Масса, кг |
|
Dunkermotoren BG 44*50 SI |
6.3* |
40 |
24 |
3500 |
64 |
0.66 |
Найдём оптимальное передаточное число.
В соответствии с оптимальным передаточным числом выберем тот же редуктор.
Основные характеристики редуктора приведены в таблице 2 (см. выше).
Проверим соотношение мощностей PДВ≥PТР

Соотношение верно.
Определим вид передаточной функции и найдём её параметры.
C учетом влияния редуктора и нагрузки передаточная функция примет следующий вид:




Функциональная схема:
ЗУ – задающее устройство ЗУ50.
ЭПУ – электрическое преобразовательное устройство Power ID.
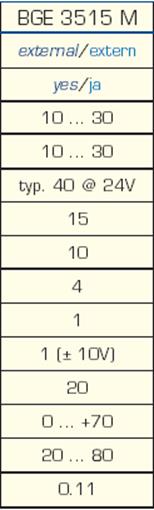
УУ – управляющее устройство Dunkermotoren controller BGE 3515 M
Д – электродвигатель постоянного тока Dunkermotoren BG 44*50 SI
Р – редуктор планетарный Dunkermotoren PLG 75
Тг – тахогенератор Faulhaber 2225 U 4,3 G9
ОУ – объект управления.
Задающее устройство ЗУ50.
|
Выходной сигнал, мА |
0-5, 0-20, 4-20 |
|
Сопротивление нагрузки для сигнала 0-5 мА, кОм, не более |
2 |
|
Сопротивление нагрузки для сигнала 0-20; 4-20 мА, кОм, не более |
0.5 |
|
Диапазон индикации выходного сигнала, % |
0-100 |
|
Напряжения питания, В |
220 |
|
Частота питания, Гц |
50/60 |
|
Потребляемая мощность, Вт, не более |
5 |
|
Масса, кг, не более |
0.7 |
Контроллер
Управляемый преобразователь напряжения малой мощности Power ID.
|
Напряжение питания управляющих схем преобразователя, В |
+15, ± 15, +5 |
|
Напряжение трехфазного силового питания, В |
220/380 |
|
Аппаратно реализованное мертвое время, нс |
200 |
|
Гарантированный температурный диапазон, °С |
-40 … +85 |
|
Точность измерения токов и напряжения, %, не ниже |
0.7 |
|
Нелинейность, %, не более |
0.2 |
Тахогенератор Faulhaber 2225 U 4,3 G9
|
Крутизна выходного напряжения , мВ/об/мин |
41.1 |
|
Максимальная частота вращения, об/мин |
5000 |
|
Нагрузочное сопротивление, кОм, не менее |
25 |
|
Погрешность в диапазоне частот вращения 500–5000 об/мин, % не более |
0.2 |
|
Коэффициент пульсации при максимальной частоте вращения, % |
7 |
|
Масса, кг. |
0.45 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.