COMPUTER MODELING OF AUTOMATIC REGULATION SYSTEM OF AIRFLOW TEMPERATURE
MikhailA. Ershov
The Scientific head Professor Sergey I. Malafeev
Department of Information Technologies
Vladimir State University
Gorky st. 87, Vladimir, 600000, RUSSIA
Tel: +7(4922) 279992, E-mail: mikele85@mail.ru
Abstract — Characteristics of processes in automated control system of airflow temperature in case of parameter and load variation with different control algorithms are considered in this work.
1. INTRODUCTION
In many technical systems and constructions that use ventilation, heating of submitted air during winter time up to the certain positive temperature is required. Special high-power heaters with automatic control are used for this purpose. The basic requirements showed to such systems are high reliability and stable quality of regulation at a wide range of ambient temperature and heater parameters change, which usually contains some parallel sections.
2. TEMPERATURE REGULATION SYSTEM REASEARCH
2.1. Modeling of automatic system of temperature regulation
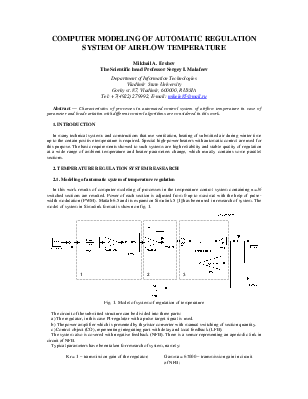
In this work results of computer modeling of processes in the temperature control system containing n=16 switched sections are resulted. Power of each section is adjusted from 0 up to maximal with the help of pulse-width modulation (PWM). Matlab 6.5 and its expansion Simulink 5 [1] has been used in research of system. The model of system in Simulink format is shown on fig. 1.
Fig. 1. Model of system of regulation of temperature
The circuit of the submitted structure can be divided into three parts:
a) The regulator, in this case PI-regulator with a pulse target signal is used.
b) The power amplifier which is presented by thyristor converter with manual switching of section quantity.
c) Control object (CO), representing integrating part with delay and local feedback (LFB).
The system also is covered with negative feedback (NFB). There is a sensor representing an aperiodic link in circuit of NFB.
Typical parameters have been taken for research of system, namely:
|
Kr = 1 – transmission gain of the regulator; |
Gamma = 67000 – transmission gain in circuit of NFB; |
|
Tr = 10 sec – time constant of the regulator; |
tu = 0.0200 sec – time of delay; |
|
Kpr = 1.2·105 – transmission gain of converter; |
Kd = 0.05 – transmission gain of the sensor; |
|
C = 1.005·106 – heat capacity of CO; |
Td = 30 sec – time constant of the sensor. |
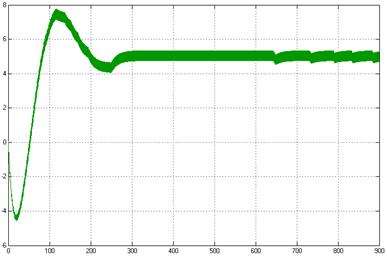
As a result of modeling it is established, that
a) Fluctuations of temperature take place at regulation with frequency of PWM. The amplitude of fluctuations depends on quantity of sections.
b) Process of an overshoot depends on quantity of sections.
Received dependences at different ambient temperatures are shown on fig. 2.
|
|
|
|
|
|
|
a |
b |
Fig. 2. Dependence of temperature fluctuations amplitude and overshoot on quantity of sections
at a – θenv = -10 ºС; b – θenv = -30 ºС
2.2. Methods of improvement of quality of regulation
The following possible decisions of improvement of quality of regulation have been considered and iresearched
1. Usage of sensor with the increased speed in circuit of NFB.
As the constant of time of sensor Td is great, a signal acting on an input of the first adder, poorly reflects the valid condition of an output of system.
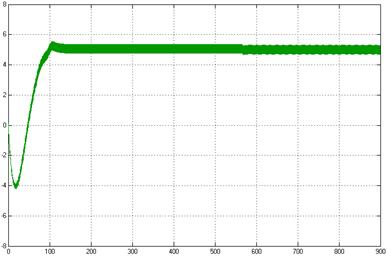
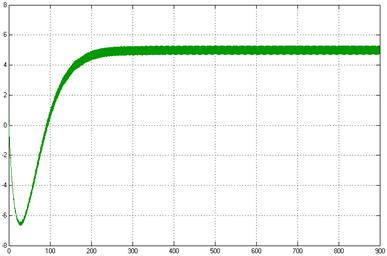
For comparison transient characteristics with Td=30 sec and Td=10 sec under identical conditions (2 sections) are shown at fig. 3. Reduction of Td allows lowering fluctuations of transient and reducing of overshoot. However in case of a many sections fluctuations are significant.
|
|
|
|
a |
b |
Fig. 3. The transitive characteristic at a – Td=30 sec, b – Td=10 sec
2. Insertion of an additional feedback on power (fig. 4).
Fig. 4. System with the regulator of power
Let us calculate parameters of elements of a feedback: Kosp and Tpr. Parameters of power regulator will be taken similar to parameters of the basic regulator of system, i.e. Tpr = Tr = 10 sec.
The coefficient of a feedback on power is defined from a condition of range conformity of a heater output power to a range of an input control signal.
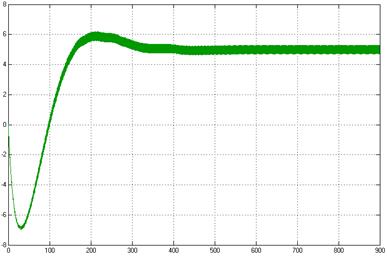
Let us consider the steady state. Supposing that influence equal 5,5 V acts on an input of 2-nd adder. As in the steady state the output of 2-nd adder should be equal 0 V, influence provided through FB circuit equals 5,5. From here influence equal 5,5/Kosp acts on an input of 3-rd adder. Similarly, influence equal 5,5/Kosp operates in control object through FB circuit. Target value of the stabilized temperature (at 0,25) is equal 0,25·Kd, i.e. value 0,25·Kd operates on an input of 4-th adder. The output of 4-th adder is equal (0,25·Kd + 10). From here 5,5/Kosp = (0,25·Kd + 10)·gamma in case of a zero output signal of 3-rd adder. For known, Kd and gamma Kosp equal to 5.4726·10-6 is obtained. Let us note, that Kosp parameter has been designed for defined task and environment temperature. Transient characteristics of system with a feedback on power for Td=30 sec and Td=10 sec. are shown on fig. 5.
Using a feedback on power allows considerable improving of regulation quality in case of many of sections. Also in case of Td=10 sec process runs without overshoot (fig. 5, b).
|
|
|
|
а |
б |
Fig. 5. The transitive characteristic with a feedback on power
at a – Td=30 sec, b – Td=10 sec
3. Usage of astatic regulator of coordinating type.
In case of using such a regulator control signal is formed taking in consideration current mistake. If the mistake is great, control is carried out by P-algorithm, if the mistake is small and does not exceed prescribed limits (-e0 … +e0) control is carried out by PI-algorithm. Usage of such regulator allows minimizing expenses of power of system for overshoot processes.
3. CONCLUSIONS
During computer modeling it has been determined that the automatic regulation system of airflow temperature has on an output fluctuation of temperature with frequency of PWM. The amplitude of fluctuations and transient time grow with increasing of sections quantity.
Usage of the sensor in circuit of NFB with increased speed, insertion of an additional feedback on power and usage of an astatic regulator of coordinating type are offered for improvement of regulation quality.
4. REFERENCES
1. J. Lazarev, Modeling of processes and systems in MATLAB. A training course, Peter: Publishing group BHV, 2005 (in Russia)
2. S.I. Malafeev, A.A. Malafeeva, Modelling and Estimating of Automatic Systems, Vladimir: Posad, 2003 (in Russian).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.