Лабораторная работа № 2
Фазовые портреты нелинейных систем и особенности нелинейной динамики
Цель работы.
Ознакомление с нелинейными системами второго порядка, содержащие объект управления

и линейный регулятор
![]() ,
,
где ![]() -
коэффициенты обратных связей.
-
коэффициенты обратных связей.
Исходные данные:
Исходная
система 2-го порядка представлена на рисунке 1.1.
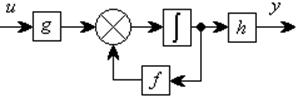
Рисунок 1.1 – Вид системы 2-го порядка
Порядок выполнения работы
1. Исследовать линейную систему, для
которой ![]() . По заданным значениям корней:
. По заданным значениям корней:
(а)
![]() ,
,
(б)
![]() ,
,
(в)
![]()
характеристического полинома ![]() рассчитать коэффициенты обратных связей
рассчитать коэффициенты обратных связей ![]() . Найти положения равновесия. Построить
фазовые портреты системы в области
. Найти положения равновесия. Построить
фазовые портреты системы в области ![]() .
.
Линейная система
ОУ:
Регулятор:
![]()
![]()
|
Система |
Корни |
Коэффициенты |
||
|
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
|
|
|
Система |
Положения равновесия |
|||
|
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
|
Колебательная граница устойчивости. |
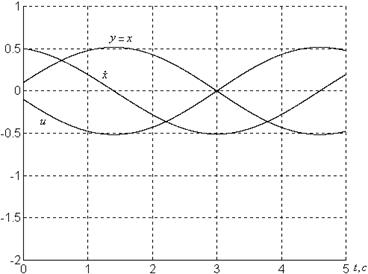
Фазовые портреты системы представлены на рисунках 1.2, 1.3.
а)
б)
Рисунок 1.2 – Графики системы
![]() при
при
а) ![]() , б)
, б) ![]()
в)
Рисунок 1.3 – График системы ![]() при
при
в) ![]()
2. Исследовать две гладкие нелинейные
системы, для которых ![]() и
и ![]() , а
коэффициенты обратной связи
, а
коэффициенты обратной связи ![]() выбраны, как указано в
п.1 (варианты а, б, в).
выбраны, как указано в
п.1 (варианты а, б, в).
1) Нелинейная система
ОУ:
Регулятор:
![]()
![]()
|
Система |
Коэффициенты обратных связей |
|
|
а |
|
|
|
б |
|
|
|
в |
|
|
|
Система |
Положения равновесия |
|||
|
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
|
Колебательная граница устойчивости. |
Особенности нелинейной динамики:
а)
тип переходного процесса – апериодический, затухающий;
система является асимптотически устойчивой;
инвариантные
множества - ![]() ,
,  ;
;
аттракторы – точечные – четные
стационарные точки ![]() , ;
, ;
области притяжения:
при ![]() ,
,  - область притяжения для
- область притяжения для ![]() ,
,![]()
при ![]() ,
, ![]() , следовательно
, следовательно  и
и  - сепаратриссы.
- сепаратриссы.
б)
тип переходного процесса – колебательный, затухающий;
система является асимптотически устойчивой;
инвариантные
множества - ![]() ,
, ;
;
аттракторы – точечные – четные
стационарные точки ![]() , ;
, ;
области притяжения:
при ![]() ,
,  - область притяжения для
- область притяжения для ![]() ,
,![]()
при ![]() ,
, ![]() , следовательно
, следовательно  и
и  - сепаратриссы.
- сепаратриссы.
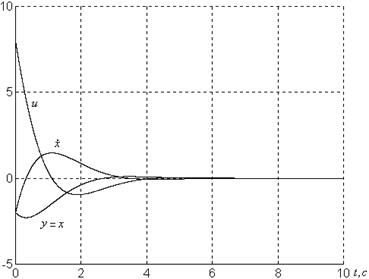
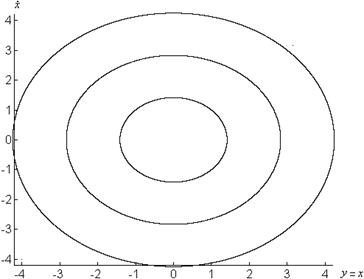
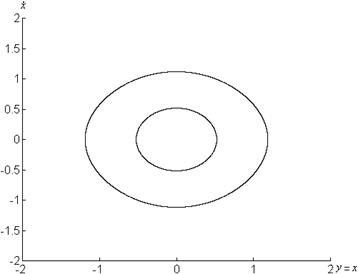
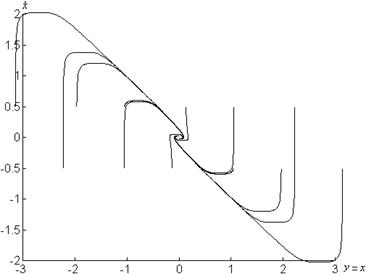
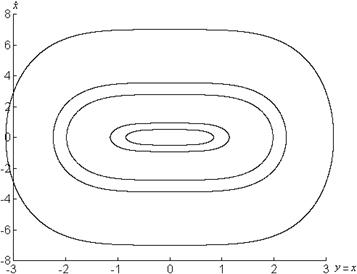
в)
тип переходного процесса – колебательный, незатухающий;
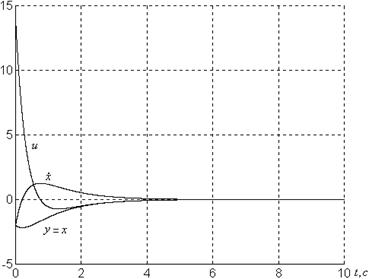
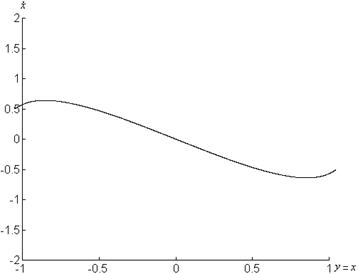
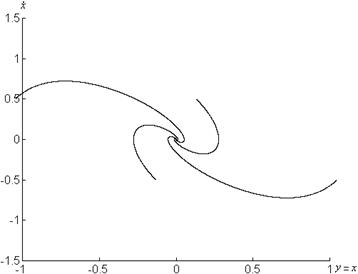
Фазовые портреты системы представлены на рисунке 1.4.
a)
б)
в)
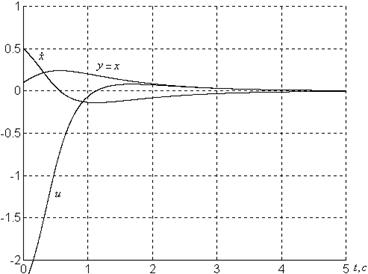
Рисунок 1.4 – Графики системы
![]() при
при
а) ![]() , б)
, б) ![]() , в)
, в) ![]()
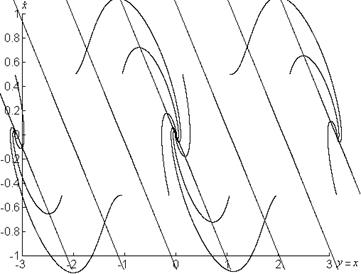
Векторные поля системы представлены на рисунке 1.5.
а) б)
в)
Рисунок 1.5 – Графики системы
![]() при
при
а) ![]() , б)
, б) ![]() , в)
, в) ![]()
2) Нелинейная система
ОУ:
Регулятор:
![]()
![]()
|
Система |
Коэффициенты обратных связей |
|
|
а |
|
|
|
б |
|
|
|
в |
|
|
|
Система |
Положения равновесия |
|||
|
а |
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
|
Колебательная граница устойчивости. |
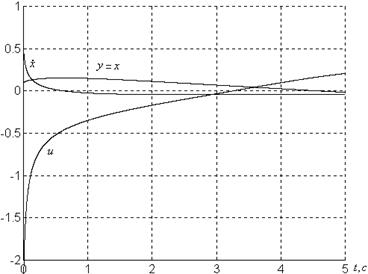
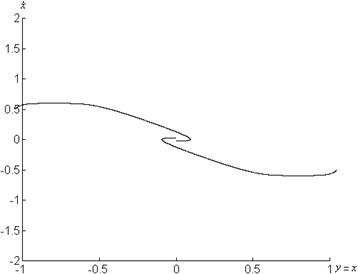
Особенности нелинейной динамики:
а)
тип переходного процесса – апериодический, затухающий;
система является асимптотически устойчивой;
инвариантные
множества - ![]() ,
, ![]() ;
;
аттракторы - стационарная точка ![]() ,
, ![]() и
кривая
и
кривая ![]() -собственное подмногообразие;
-собственное подмногообразие;
области притяжения:
всё пространство ![]() ;
;
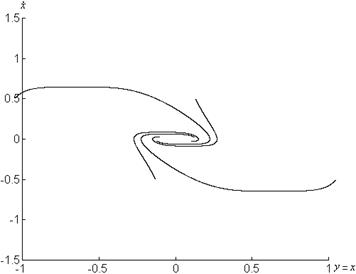
б)
тип переходного процесса – колебательный, затухающий;
система является асимптотически устойчивой;
инвариантные
множества - ![]() ,
, ![]() ;
;
аттракторы - стационарная точка ![]() ,
, ![]() и
кривая
и
кривая ![]() -собственное подмногообразие;
-собственное подмногообразие;
области притяжения:
всё пространство ![]() ;
;
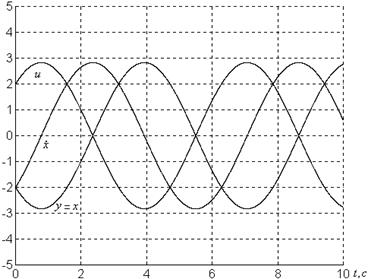
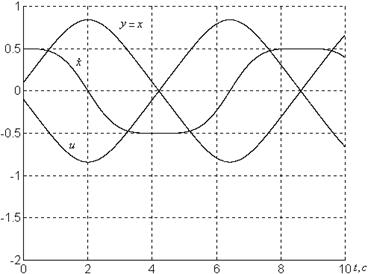
в)
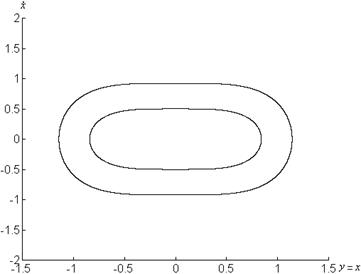
тип переходного процесса – колебательный, незатухающий;
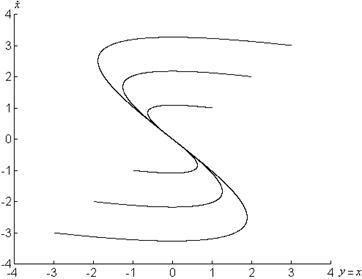
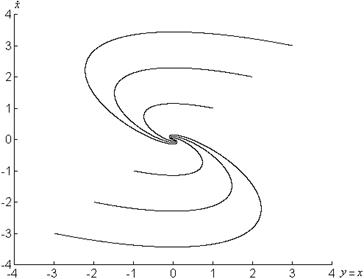
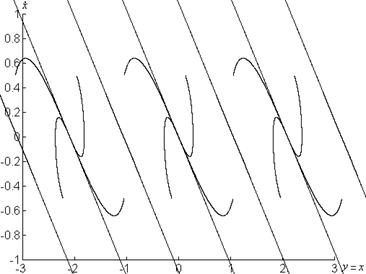
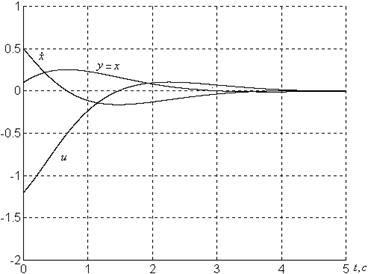
Фазовые портреты системы представлены на рисунках 1.6, 1.7.
а)
Рисунок 1.6 – Графики системы
![]() при
при
а) ![]()
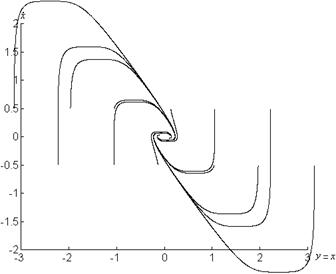
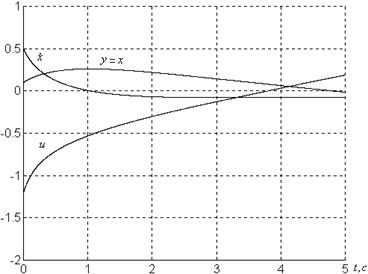
б)
в)
Рисунок 1.7 – Графики системы
![]() при
при
б) ![]() , в)
, в) ![]()
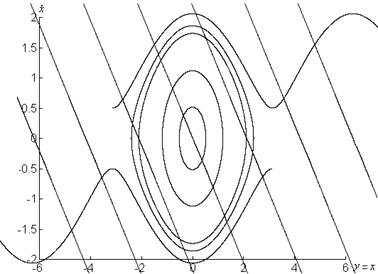
Векторные поля системы представлены на рисунке 1.8, 1.9.
а) б)
Рисунок 1.8 – Графики системы
![]() при
при
а) ![]() , б)
, б) ![]()
в)
Рисунок 1.9 – График системы ![]() при
при
в) ![]()
Вывод:
В результате выполнения работы были исследованы нелинейные системы второго порядка.
Появление нелинейностей в регуляторе может привести к изменению групповых свойств системы, так например, к появлению множества как устойчивых, так и нет положений равновесия, т.е. множества областей с различными свойствами, что может привести к нежелательным режимам работы, а также влиять на динамические свойства системы, искажать траектории движения, показатель качества и т.п. Подробный анализ нелинейных систем может выявить наилучшую стратегию управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




